Il sistema di inseguimento solare è un sistema che massimizza la conversione dell'energia solare nel processo di produzione di energia fototermica e fotovoltaica.
Sistema di inseguimento solare monoasse a pannello solare Dual-Portratit

Il sistema di inseguimento solare è un sistema che massimizza la conversione dell'energia solare nel processo di produzione di energia fototermica e fotovoltaica.
Il sistema di inseguimento solare funziona mantenendo il pannello solare sempre rivolto verso il sole, consentendo ai raggi solari di colpire sempre verticalmente l'unità di alimentazione del pannello solare.
Il sistema di inseguimento solare universale del mondo deve essere calcolato in base alle informazioni come la latitudine e la longitudine, il punto è stato posizionato ogni giorno del diverso periodo dell'anno l'angolo del sole, in ogni momento dell'anno la posizione del sole sarà memorizzata nel PLC e single- computer con chip o software per computer, dipende dal calcolo della posizione fissa in ogni momento della posizione del sole per realizzare l'inseguimento.

| Tracciamento dei parametri della struttura | |||
| Tecnologia di tracciamento | Sistema di tracciamento monoasse a doppio pannello solare | Capacità massima per fila | 48 kWp |
| Quantità di moduli fotovoltaici per riga | 45 PZ (2Px45) o 30 PZ (2PX30) | Intervallo di tracciamento | ±45°a ±60° |
| Precisione di tracciamento | ±1° | Adattabilità al terreno | 10°nord-sud, est-ovest illimitato |
| Protezione della velocità del vento | 18 m/s | Modulo di fondazione | Calcestruzzo (fondazione interamente in acciaio personalizzabile) |
| Monitoraggio dei parametri del controller | |||
| Sistema di controllo | MCU | Tipo di comunicazione | RS485 o Zigbee wireless |
| Modalità di stivaggio notturno | Avere | Algoritmo di ritorno | Avere |
| Prevenzione del sovraccarico | Avere | Controllo automatico dei problemi Funzione | Avere |
| Tensione di sistema | DC24 | Sistema di guida | Unità di rotazione |
| Modalità di acquisizione di energia | Alimentazione Esterna/Autoalimentata | Algoritmo di controllo | Algoritmo astronomico + anello chiuso (Controllo AI) |

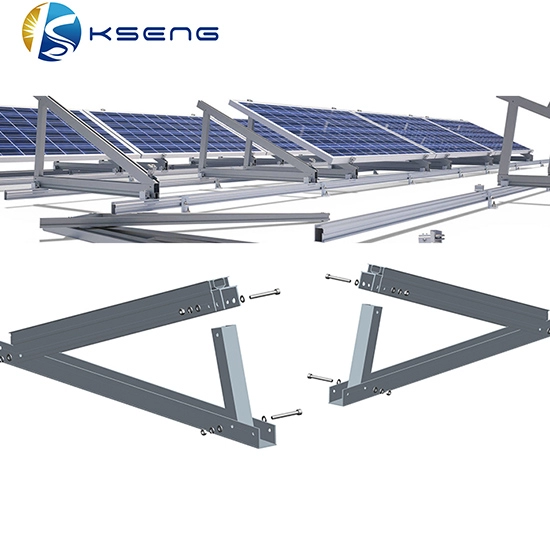
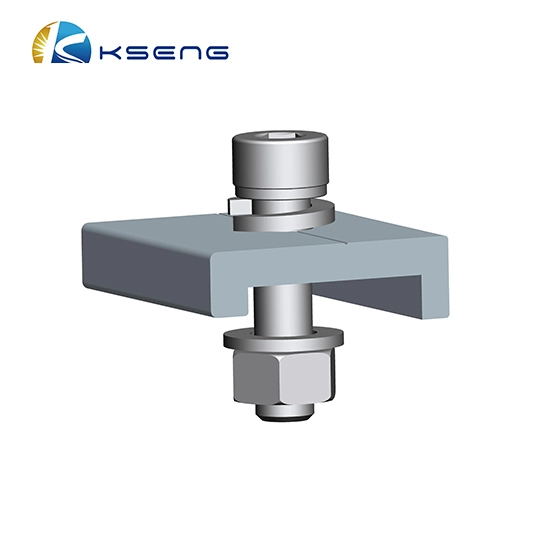
Parti strutturali principali:

Caratteristica dell'inseguitore solare Kseng Multipoint Drive:
Il rapporto di smorzamento del sistema è maggiore, può ridurre l'ampiezza del componente del 50%.
La forza del mandrino può ridurre del 40%.
Ridurre la forza sulla colonna motrice del 50%.
Ridurre l'angolo di torsione del mandrino del 60%.
Migliore resistenza al vento del sistema.

Adattabilità al terreno:
1. Disposizione flessibile, uso completo della terra irregolare e può migliorare l'utilizzo del suolo.
2. Il nord e il sud possono adattarsi a una pendenza del 20%.
3. Pendenza illimitata a est-ovest.

Schema di disposizione dei componenti:


Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier