Dettagli del prodotto
Convertitore Synchro/Resolver-Digitale
(Serie HSDC/HRDC174)
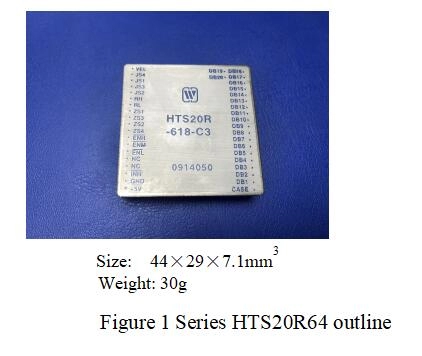
1. Caratteristiche del prodotto (vedi Fig. 1 per la vista esterna e Tabella 1 per i modelli)
Conversione dell'isolamento differenziale interno
Risoluzione: 12 bit, 14 bit
Uscita latch a tre stati
Elevata velocità di tracciamento continuo
Pacchetto custodia in metallo nebbia salina a 32 fili
Assemblaggio MCM ad alta densità
Capacità antistatica 2000V
Pin-to-pin compatibile con SDC/RDCl740/1741/1742 prodotto dell'azienda AD
Dimensioni: 44,2 × 28,9 × 7,2 mm3; peso: 22 g
Fig. 1 Vista esterna della serie HSDC/HRDC174
2. Ambito di applicazione
Sistema strumentale di volo;
Sistema di controllo dell'artiglieria;
Sistema di controllo avionico;
Sistema di controllo radar;
Sistema di navigazione della nave;
Sistema di monitoraggio dell'antenna;
Sistema robotico;
tornio a controllo numerico;
Altri vari sistemi di controllo automatico Tabella 1 modelli di prodotto
12 bit 14 bit
Sincro Risolutore Sincro Risolutore
HSDCl742-X11 HRDCl742-X13 HSDCl744-X11 HRDCl744-X13
HSDCl742-X12 HRDCl742-X14 HSDCl744-X12 HRDCl744-X14
HSDCl742-X41 HRDCl742-X18 HSDCl744-X41 HRDCl744-X18
HSDCl742-X42 HRDCl742-X23 HSDCl744-X42 HRDCl744-X23
HSDCl742-X21 HRDCl742-X24 HSDCl744-X21 HRDCl744-X24
HSDCl742-X22 HRDCl742-X28 HSDCl744-X22 HRDCl744-X28
HRDCl742-X43 HRDCl744-X43
HRDCl742-X44 HRDCl744-X44
HRDCl742-X48 HRDCl744-X48
3. Schema
I prodotti della serie HSDC/HDC174 sono sincronizzatori/resolver a tracciamento continuo ibridi integrati a 12 o 14 bit per convertitori digitali progettati secondo il principio servo di tipo II. Questa serie di prodotti adotta il processo MCM, gli elementi principali adottano chip speciali sviluppati indipendentemente dal nostro istituto. Il prodotto adotta un contenitore in metallo resistente alla nebbia salina a cavità superficiale DIL a 32 fili con volume ridotto e peso leggero e compatibile pin-to-pin con i prodotti SDC/RDC1740/1741/1742 dell'azienda AD, USA.
La progettazione e la produzione di HSDC/HRDCl74 soddisfano i requisiti di GJB 2438A-2002 "Specifiche generali per circuiti integrati ibridi" e le specifiche di prodotto con grado di garanzia della qualità H. 4. Performance tecnica (Tabella 2, Tabella 3)
Tabella 2 Condizioni nominali e condizioni operative consigliate
Massimo valore di valutazione assoluto Tensione di alimentazione Vs: ± 17.25VDC
Tensione di alimentazione logica VL: +7V
Intervallo di temperatura di conservazione: -65 ℃ ~ + 150 ℃
Condizioni Operative Raccomandate Tensione di alimentazione Vs: ±15±0,75V
Tensione di alimentazione 5 V: 5 ± 0,25 V
Valore effettivo della tensione di riferimento VRef: 115V, 26V, 11.8V
Valore effettivo della tensione del segnale V1: 90V, 26V, 11,8V
Frequenza di riferimento f*: 400 Hz, 50 Hz, 2,6 kHz
Intervallo di temperatura di esercizio TA: -55℃~125℃
Nota: * indica che può essere personalizzato secondo le esigenze dell'utente.
Tabella 3 Caratteristiche elettriche (-55~+125℃)
Caratteristiche Serie HSDC/HRDC1740 Serie HSDC/HRDC1744 Unità Osservazioni
Precisione ±8,5 (massimo) ±5,3 (massimo) Minuto angolare
Velocità di tracciamento 36 (tipico) 27 (tipico) giri/sec
Risoluzione 12 14 Po
Segnale e frequenza di riferimento 50~2600 50~2600 Hz
Tensione di ingresso del segnale 2~90 2~90 V
Tensione di ingresso di riferimento 2~115 2~115 V
Impedenza di ingresso del segnale 90V Unica estremità 100 100 kΩ
Segnale Differenziale 200 200 kΩ
26V Unica estremità 28 28 kΩ
Segnale Differenziale 56 56 kΩ
11,8 V Unica estremità 13 13 kΩ
Segnale Differenziale 26 26 kΩ
Impedenza di ingresso di riferimento 115V Unica estremità 127 127 kΩ
Riferimento Differenziale 254 254 kΩ
26V Unica estremità 28 28 kΩ
Riferimento Differenziale 56 56 kΩ
90V Unica estremità 100 100 kΩ
Riferimento Differenziale 200 200 kΩ
Costante di accelerazione 80000 (min.) 56000 (min.) s2 Garanzia di progettazione
Risposta al passo 75 (massimo) 100 (massimo) ms
Corrente di alimentazione +VS +15V 35 (massimo) 35 (massimo) mA
-VS +15V 35 (massimo) 35 (massimo) mA
VL +5V 56 (massimo) 56 (massimo) mA
Consumo di energia 1,4 (massimo) 1,4 (massimo) W
Tempo di assestamento o rilascio 80 (massimo) 80 (massimo) ns
Tempo di assestamento 640 (massimo) 640 (massimo) ns
Larghezza impulso occupato 200~600 (tipico 400) 200~600 (tipico 400) ns
Capacità di carico 2 minuti.) 2 minuti.) TTL
Output digitale VOH 3,3 (min.) 3,3 (min.) VCC
VOL 0,7 (massimo) 0,7 (massimo) VCC
Capacità di carico 3 (massimo) 3 (massimo) TTL
Selezione del range di temperatura di esercizio 8YZ -55~+125 -55~+125 ℃
5. Principio di funzionamento (Fig. 2 e Fig. 3)
Il segnale di ingresso di synchro (o resolver) viene convertito nel segnale ortogonale attraverso l'isolamento differenziale interno:
Vsinu003dKE0sin(ωt+α) sinθ (peccato)
Vcosu003dKE0sin(ωt+α) cosθ (cos)
Dove, θ è l'angolo di ingresso analogico.
Questi due segnali e l'angolo digitale φ del contatore reversibile interno vengono moltiplicati nel moltiplicatore delle funzioni seno e coseno e si ottiene il segnale di errore dopo l'elaborazione:
KE0sin(ωt+α) (sinθ cosφ -cosθ sinφ)
cioè KE0sin(ωt+α) sin(θ-φ)
Questo segnale viene inviato all'oscillatore controllato in tensione dopo l'amplificazione, la discriminazione di fase, la filtrazione di integrazione. Se θ-φ≠0, l'oscillatore controllato in tensione emetterà impulsi e il contatore reversibile li conta fino a θ-φu003d0. In questo processo, il convertitore tiene costantemente traccia del cambiamento dell'angolo di input.
Fig.2 Schema a blocchi per principio di funzionamento
Fig. 3 Diagramma della sequenza temporale per il trasferimento in bus
l'ingresso logico inibisce solo il trasferimento dei dati dal contatore reversibile all'uscita latch senza interrompere il funzionamento del circuito di tracciamento. Quando il sistema Inhibit viene rilasciato, verrà generato automaticamente un impulso, che viene utilizzato per aggiornare i dati di uscita.
input determina lo stato dei dati di output. Considerando che Logic Hi fa apparire l'estremità dell'uscita in stato di alta impedenza; Logica bassa trasferisce i dati in latch ai pin di uscita. fa sì che i dati a 8 bit alti siano validi, mentre avvia i dati a 6 bit bassi a essere validi (HSDC/HRDC1742 è di tipo a 4 bit bassi).
Impegnato
Quando l'ingresso del convertitore cambia, Busy emette un treno di impulsi di livello CMOS, la sua frequenza è determinata dalla massima velocità di rotazione. Il fronte di discesa degli impulsi di occupato attiva il latch per aggiornare i dati e i dati di uscita sono validi dopo max. Ritardo di 600 ns. La larghezza tipica degli impulsi Occupati è di 400 ns. La capacità di carico dell'uscita è 3TTL.
(1) Modalità e sequenza temporale di trasferimento dei dati
Sono disponibili due metodi per il trasferimento dei dati:
① modalità
Dopo 640 ns di livello logico basso, i dati di output sono validi e il convertitore effettua il trasferimento dei dati tramite e . Dopo il rilascio di Inhibit, il sistema genererà automaticamente un impulso con la sua ampiezza uguale a quella di Occupato per l'aggiornamento dei dati.
② Modalità busto:
Sul fronte di salita dell'impulso Occupato, il contatore reversibile a tre stati conta; al fronte discendente dell'impulso Busy genera internamente un impulso latch con larghezza uguale a quella dell'impulso Busy per l'aggiornamento dei dati del latch a tre stati, la sequenza temporale di trasferimento dei dati è mostrata in Fig.3, in altre parole , dopo 600 ns di logica occupata bassa, il trasferimento stabile dei dati è valido. In modalità di lettura asincrona, l'uscita Busy è un treno di impulsi di livello CMOS, le larghezze del suo livello alto e basso dipendono dalla frequenza operativa e dalla velocità di rotazione del dispositivo selezionato.
(2) Compatibilità
Quando i prodotti della serie HSDC/HRDC174 vengono utilizzati in condizioni di segnali non nominali e tensione di riferimento non nominale, le resistenze proporzionali sono collegate in serie all'estremità del segnale e all'estremità dell'ingresso di eccitazione per realizzare la compatibilità.
Esempio 1: Il collegamento di HSDC1742-441 per tensione di eccitazione/tensione del segnale/frequenza di 36V/26V/400Hz è mostrato in Fig. 4:
Esempio 2: Il collegamento di HRDC1742-418 per tensione di eccitazione/tensione del segnale/frequenza di 36V/26V/400Hz è mostrato in Fig. 5:
Fig. 4 Collegamento di HSDC1742-411
Fig. 5 Collegamento di HSDC1742-418 R1u003d(valore nominale V1 - V1)×1,11 k
u003d(26 V- 11,8 V)×1,11 k
u003d15,8 kΩ
R2u003d(valore nominale VRef - VRef)×1,11 k
u003d(36 - 26)×1,11 k
u003d11,1 kΩ
R3u003d(valore nominale V1 - V1)×1,11 k
u003d(26 V- 11,8 V)×1,11 k
u003d15,8 kΩ
R4u003d(valore nominale VRef - VRef)×1,11 k
u003d(36 - 26)×1,11 k
u003d11,1 kΩ
(3) Comportamento dinamico
La funzione di trasferimento del convertitore è data dalla Fig. 6:
Guadagno ad anello chiuso:
Guadagno ad anello chiuso:
θin + θout
Fig. 6 Funzione di trasferimento
Modello: HSDC/HRDC1742
Qui, Kau003d80000, T1u003d0,0087, T2u003d0,001569
(4) Errore di accelerazione
Il convertitore è progettato utilizzando il principio di tracciamento del servo loop di tipo II, quindi in teoria non ha un errore di ritardo di velocità, ma ha un errore di accelerazione. Questo errore può essere definito come segue utilizzando la costante di accelerazione K del convertitore:
Kau003d
Di seguito è riportato l'esempio per calcolare l'errore di tracciamento del convertitore a 14 bit HSDC1744 utilizzando la costante di accelerazione Ka:
Kau003d56000, l'accelerazione è 50 giri/s2
Errore del bit meno significativo u003d u003d14.62LSBs
6. Curve caratteristiche tipiche (Fig. 7 e Fig. 8)
Frequenza/Hz
Fig. 7 Grafico del guadagno di HSDC/HRDC1742
Frequenza/Hz
Fig. 8 Grafico del guadagno di HSDC/HRDC1742
7. Curva MTBF (Fig. 9)
Temperatura/℃
Fig. 9 Curva della temperatura MTBF 8. Designazione del perno (Fig. 10, Tabella 4)
Fig. 10 Perni (vista dal basso)
(Nota: secondo GJB/Z299B-98, buone condizioni del terreno previste)
Tabella 4 Designazione dei pin
Spillo Simbolo Funzione Spillo Simbolo Funzione
1 D1 Uscita digitale 1 (MSB) 17② NC/S4 Nessuna connessione/ingresso del resolver S4
2 D2 Uscita digitale 2 18 S3 Ingresso risolutore/sincro S3
3 D3 Uscita digitale 3 19 S2 Ingresso resolver/sincro S2
4 D4 Uscita digitale 4 20 S1 Ingresso resolver/sincro S1
5 D5 Uscita digitale 5 21 NC Nessuna connessione
6 D6 Uscita digitale 6 22 NC Nessuna connessione
7 D7 Uscita digitale 7 23 Caso Caso
8 D8 Uscita digitale 8 24④ NC或(Vel)* Nessuna connessione (o uscita di velocità)
9 D9 Uscita digitale 9 25③ Abilita basso 4 bit/6 bit
10 D10 Uscita digitale 10 26 Abilita alta 8 bit
11 D11 Uscita digitale 11 27 Impegnato Segnale “occupato”.
12 D12 Uscita digitale 12 28 Inibire
13 NC/D13 Nessuna connessione/uscita digitale 13 29 +VS +15V di alimentazione
14 NC/D14 Nessuna connessione/uscita digitale 14 30 GND Terra
15 RLo Ingresso segnale di riferimento di fascia bassa 31 -VS -15V di alimentazione
16 RH Ciao Ingresso del segnale di riferimento di fascia alta 32 VLo +5V di potenza
Note: ① Per i convertitori della serie HSDC1742 e HRDC1742, i pin 13 e 14 non sono collegati;
② Per HSDC174X, il pin 17 non è collegato; per HRDC174X, il pin 17 è l'estremità di ingresso del resolver S4;
③ Per i convertitori serie HSDC1742 e HRDC1742, il pin 25 è per Abilita controllo a 4 bit basso;
④ Quando c'è un requisito di velocità, viene portato fuori dal pin 24.
9. Tabella dei valori di peso (Tabella 5)
Tabella 5 Tabella dei valori di peso
Po Angolo Po Angolo Po Angolo
1 180.0000 6 5.6250 11 0,1758
2 90.0000 7 2.8125 12 (per LSB a 12 bit) 0,0879
3 45.0000 8 1.4063 13 0,0439
4 22.5000 9 0,7031 14 (per LSB a 14 bit) 0,0220
5 11.2500 10 0,3516
10. Schema di collegamento per applicazione tipica (Fig. 11)
Appunti:
(1) La tensione tra il pin 29 e il pin 31 deve essere ±15 V e non deve essere collegata al contrario. La potenza logica digitale +5V è collegata al pin 32.
(2) Tra l'alimentazione e la terra, collegare in parallelo un condensatore ceramico da 0,1 µF e un condensatore elettrolitico da 6,8 µF.
(3) Il pin contrassegnato con Case è stato collegato alla custodia.
(4) Le uscite digitali di HSDC/HRDC1742 sono da pin 1 a 12, pin 13 e 14 non sono collegati.
Fig. 11 Schema di collegamento per applicazione tipica
(5) Il riferimento è collegato a RLo sul pin 15 e RHi sul pin 16. In caso di sincronismo, i segnali sono collegati a S1, S2 e S3 secondo le seguenti convenzioni:
sin(ωt+α) sinθ
sin(ωt+α) sin(θ+120o)
sin(ωt+α) sin(θ+240o)
Nel caso di resolver, i segnali sono collegati a S1, S2, S3 e S4 secondo le seguenti convenzioni:
sin(ωt+α) sinθ
sin(ωt+α) cosθ
(6) Per il resolver, il pin 17 è S4 e per il synchro, il pin 17 non è collegato.
11. Specifiche della confezione (unità: mm) (Fig. 12, Tabella 6 e 7)
Fig.8 Vista esterna del pacco Tabella 6 Simboli e valori nominali
Simbolo Valore nominale
A 7.2
Φb 0,45
D 44.2
E 28.9
e 2.54
e1 22.86
L 5 minuti
Tabella 7 Materiali del caso
Modello di custodia Intestazione Placcatura dell'intestazione Coperchio Placcatura di copertura Materiale dei perni Placcatura a perno Stile di tenuta Osservazioni
UP4429- 32a Kovar (4J29) Ni Lega Fe-Ni (4J42) Ni Kovar (4J29) Ni/Au Imballaggio abbinato Il rivestimento del pin 23 è Ni
Nota: la temperatura dei pin di saldatura non deve superare i 300 ℃ entro 10 secondi.
12. Tasto di numerazione dei pezzi (Fig. 13)
Fig. 13 Legenda per la numerazione dei pezzi
Nota: quando la tensione del segnale di cui sopra e la tensione di riferimento (Z) non sono standard, devono essere fornite come segue:
(es. tensione di riferimento 5V e tensione di segnale 3V sono espressi come -5/3)
Precauzioni per l'uso
La tensione di alimentazione deve essere mantenuta alla tensione di corretta polarità.
Quando il massimo viene superato il valore nominale assoluto, il dispositivo potrebbe danneggiarsi.
Durante l'assemblaggio, la parte inferiore del prodotto deve aderire strettamente alla scheda del circuito in modo da evitare danni ai pin e, se necessario, deve essere aggiunta una disposizione antiurto.
Non piegare i piedini, altrimenti ciò causerà la rottura dell'isolante, che influirà sulla proprietà di tenuta.
Quando l'utente effettua un ordine per il prodotto, gli indici dettagliati delle prestazioni elettriche devono fare riferimento allo standard aziendale pertinente.
Convertitore Synchro/Resolver-Digitale
(Serie HSDC/HRDC1746)
1. Caratteristiche (vedi Fig. 1 per la vista esterna e Tabella 1 per i modelli)
Conversione dell'isolamento differenziale interno
Risoluzione: 16 bit
Uscita latch a tre stati
Tracciamento ininterrotto durante il trasferimento dei dati
Pacchetto custodia in metallo a 32 fili
Dimensioni: 45,39 × 29,0 × 7,2 mm2; Peso: 28 g
Fig. 1 Vista esterna della serie HSDC/HRDC1746 Tabella 1 Modelli di prodotto
HRDC1746 418
HRDC1746 414
2. Ambito di applicazione
Sistema strumentale di volo; sistema di servocomando militare; sistema di controllo dei cannoni; sistema elettronico dell'aviazione; sistema di controllo radar; sistema di navigazione navale; monitoraggio dell'antenna; tecnologia robotica, macchine utensili a controllo numerico computerizzato (CNC); e altri sistemi di controllo dell'automazione.
3. Schema
Synchro/resolver serie HSDC/HRDC1746: il convertitore digitale è progettato sul principio del servo tracking di tipo II e adotta l'ingresso di isolamento differenziale, l'uscita dati adotta la modalità latch a tre stati, è adatto per la conversione del segnale analogico/segnale digitale di tre -wire synchro e resolver a quattro fili. Con un'elevata velocità di conversione e prestazioni stabili e affidabili, questo dispositivo può essere ampiamente applicato nella misurazione dell'angolo e nel sistema di controllo automatico.
Questo prodotto è realizzato mediante il processo di integrazione ibrida a film spesso ed è un pacchetto metallico DIP a 32 fili totalmente sigillato. La progettazione e la fabbricazione dei prodotti devono soddisfare i requisiti di GJB2438A-2002 "Specifiche generali del circuito integrato ibrido" e le specifiche dettagliate per i prodotti.
4. Performance tecnica (Tabella 2, Tabella 3)
Tabella 2 Condizioni nominali e condizioni operative consigliate
Massimo valore di valutazione assoluto Tensione di alimentazione Vs: ±17.25VOC
Tensione logica VL: +7V
Intervallo di temperatura di conservazione: -55 ~ + 150 ℃
Condizioni Operative Raccomandate Tensione di alimentazione Vs: ±15±5%
Valore effettivo della tensione di riferimento VRef: ±10% del valore nominale
Valore effettivo della tensione del segnale Vi: ±5% del valore nominale
Frequenza del segnale di riferimento f*: ±10% del valore nominale
Sfasamento tra segnale ed eccitazione: <±10%
Intervallo di temperatura di esercizio TA: 40~+105℃
Tabella 3 Caratteristiche elettriche
Caratteristiche Serie HSDC/HRDC1746 Osservazioni
min. Massimo
Precisione/minuto angolare 2.6 2.6
Velocità di tracciamento: rps 3 3
Risoluzione/bit 16
Segnale e frequenza di riferimento/Hz 50 2.6k
Tensione del segnale (valore effettivo)/V 2 90
Tensione di riferimento (valore effettivo)/V 2 115
Nota: * indica che può essere personalizzato secondo le esigenze dell'utente.
5. Principio di funzionamento
Il segnale di ingresso sincronizzato (o segnale di ingresso del resolver) viene convertito nel segnale ortogonale attraverso l'isolamento differenziale interno:
V1-KE0sinθ sinωt
V2-KE0cosθ sinωt
Dove, θ è l'angolo di input simulato.
Il segnale ortogonale viene moltiplicato per l'angolo digitale binario φ nel contatore interno reversibile nel moltiplicatore della funzione seno-coseno e si ottiene una funzione di errore:
KE0sinθ cosφ sinωt-KE0cosθ sinφ sinωtu003dKE0sin(θ-φ) sinωt
Attraverso l'amplificazione dell'errore, la discriminazione di fase e il filtraggio di questa funzione di errore, si ottiene sin(θ-φ), quando θ-φu003d0 (entro la precisione del convertitore), questo errore farà cambiare l'impulso di correzione dell'uscita dell'oscillatore controllato in tensione l'angolo digitale binario φ del contatore reversibile in modo da rendere il valore φ di uscita uguale all'ingresso θ entro la precisione del convertitore, il sistema diventa stabile e può seguire la variazione dell'angolo di ingresso φ. In questo modo si ottiene sul contatore reversibile un angolo digitale binario φ che rappresenta l'angolo dell'albero di ingresso θ (Fig. 2).
Fig. 2 Schema a blocchi del circuito
(1) Caratteristiche dinamiche
La funzione di trasferimento del convertitore è mostrata in Fig. 3:
Guadagno ad anello aperto:
Funzione ad anello chiuso:
Per il modulo di questo modello Kau003d48000/S2, T1u003d7.1ms, T2u003d1.25ms
Fig. 3 Trasferimento di funzione del convertitore
(2) Modalità di trasferimento dei dati e sequenza temporale
Controllo selezione chip
Questo pin è il pin di ingresso della logica di controllo, la sua funzione è quella di inviare i dati al convertitore per realizzare il controllo a tre stati. Il livello basso è valido, i dati di uscita del convertitore occupano il bus dati. Quando è ad alto livello, il pin di uscita dati del convertitore è in tre stati, il dispositivo non occupa il bus.
Selezione byte
Questo pin è il pin di ingresso della logica di controllo, la sua funzione è di eseguire esternamente il controllo di selezione sui dati di uscita del convertitore nella modalità di trasferimento del bus dati a 8 bit o del bus dati a 16 bit. Quando è richiesta la modalità di trasferimento del bus dati a 16 bit, mantenere questo pin logico alto, i dati verranno trasferiti nel bus, l'uscita del byte alto è nel pin da D1 a D8 (D1 è il bit alto) e il byte basso è in D9 a D16 . Quando è necessaria la modalità di trasferimento del bus di dati a 8 bit, i dati vengono ottenuti dai pin da D1 a D8 (disposti da alto a basso) e gli 8 bit alti e gli 8 bit bassi sono ottenuti attraverso due sequenze temporali, in altre parole, quando Byte select è logico alto, vengono emessi 8 bit alti e quando è logico basso, vengono emessi 8 bit bassi.
Controllo blocco dati (segnale di inibizione)
Questo pin è il pin di ingresso della logica di controllo, la sua funzione è quella di inviare i dati all'esterno del convertitore per realizzare un controllo di blocco o bypass opzionale. A livello alto, i dati di uscita del convertitore vengono emessi direttamente senza latch, vedere il diagramma della sequenza temporale del trasferimento dei dati. A livello basso, i dati di uscita del convertitore vengono bloccati, il loop interno non viene interrotto e il tracciamento continua a funzionare, ma il contatore non emette dati. Quando è necessario trasferire i dati, il convertitore controlla prima il segnale per bloccare i dati dall'alto verso il basso, mantiene la logica bassa per 640 ns, quindi imposta l'ingresso su basso (in questo momento il dispositivo occupa il bus dati), quindi ottiene dati tramite Byte select, quindi impostare tutte le logiche di controllo su alto per aggiornare e bloccare i dati in modo da essere pronti per il trasferimento dei dati successivi, fare riferimento ai diagrammi di sequenza temporale del trasferimento dei dati Fig.4 e Fig.5.
(3) Metodo di attenuazione del segnale di ingresso (Fig.4 e Fig.5)
Fig4 Sequenza temporale del trasferimento del bus a 16 bit
Fig5 Sequenza temporale del trasferimento del bus a 8 bit
6. Curva MTBF (Fig. 6)
Fig.6 Curva temperatura MTBF 7. Designazione del perno (Fig. 7, Tabella 4)
Fig. 7 Perni (vista dal basso)
(Nota: secondo GJB/Z299B-98, buone condizioni del terreno previste)
Tabella 4 Designazione del pin
Spillo Simbolo Significato Spillo Simbolo Significato
1 NC Nessuna connessione 17 NC Lascia scollegato
2 D9 Uscita per bit digitale 9 18 RH Ciao Ingresso RHi del resolver
3 D10 Uscita per bit digitale 10 19 RLo Ingresso RLo del resolver Rotary
4 D11 Uscita per bit digitale 11 20 GND Terra
5 D12 Uscita per bit digitale 12 21 -VS -15V di alimentazione
6 D13 Uscita per bit digitale 13 22 +VS +15V di alimentazione
7 D14 Uscita per bit digitale 14 23 Controllo di chiusura digitale
8 D15 Uscita per bit digitale 15 24 D1 Uscita per bit digitale 1
9 D16 Uscita per bit digitale 16 25 D2 Uscita per bit digitale 2
10 Chip seleziona Abilita controllo 26 D3 Uscita per bit digitale 3
11 Bisello Selezione byte 27 D4 Uscita per bit digitale 4
12 S4/NC① Ingresso S4/nessuna connessione 28 D5 Uscita per bit digitale 5
13① S3 Ingresso S3 29 D6 Uscita per bit digitale 6
14① S2 Ingresso S2 30 D7 Uscita per bit digitale 7
15 S1 Ingresso S1 31 D8 Uscita per bit digitale 8
16 NC Nessuna connessione 32 NC Nessuna connessione
Nota: ① Per il dispositivo HSDC, S4 non viene utilizzato.
8. Tabella dei valori di peso (Tabella 5)
Tabella 5 Tabella dei valori di peso
Bit (MSB) Angolo Bit (MSB) Angolo Bit (MSB) Angolo Bit (MSB) Angolo
1 180.0000 5 11.2500 9 0,7031 13 0,0439
2 90.0000 6 5.6250 10 0,3516 14 0,0220
3 45.0000 7 2.8125 11 0,1758 15 0,0110
4 22.5000 8 1.4063 12 0,0879 16 0,0055
Collegamento del convertitore
±15V, +5V e GND devono essere collegati ai pin corrispondenti sul convertitore, notare che le polarità dell'alimentazione devono essere corrette, altrimenti il convertitore potrebbe danneggiarsi. Si consiglia di collegare la capacità di bypass di 0,1μF e 6,8μF in parallelo tra ciascun terminale di alimentazione e la terra.
Il segnale e la sorgente di eccitazione possono essere collegati a S1, S2, S3 e S4 e RHi e RLo terminano con un errore del 5%.
L'ingresso del segnale deve corrispondere alla fase della sorgente di eccitazione in modo che possano essere correttamente collegati al convertitore, le loro fasi sono le seguenti:
RHi~RLo:VRsinωt
Per il sincronismo, gli ingressi di segnale sono:
Per S1~S3: sinθ sinωt
Per S3~S2: sin(θ+120o) sinωt
Per S2~S1: sin(θ+240o) sinωt
Per il resolver, gli ingressi di segnale sono:
Per S1~S3: sinθ sinωt
Per S2~S4: cosθ sinωt
Nota: nessun segnale di ingresso di RHi, RLo, S1, S2, S3 e S4 può essere collegato ad altri pin per timore di danni al dispositivo.
10. Specifiche della confezione (unità: mm) (Fig. 8, Tabella 6)
Fig.8 Vista esterna del pacco
Tabella 6 Materiali del caso
Modello di custodia Intestazione Placcatura dell'intestazione Coperchio Placcatura di copertura Materiale dei perni Placcatura a perno Stile di tenuta Osservazioni
UP4429- 32a Kovar (4J29) Ni Lega Fe-Ni (4J42) Ni Kovar (4J29) Ni/Au Imballaggio abbinato
Nota: la temperatura dei pin di saldatura non deve superare i 300 ℃ entro 10 secondi.
11. Tasto di numerazione dei pezzi (Fig. 9)
Fig. 9 Legenda per la numerazione dei pezzi
Nota: quando la tensione del segnale di cui sopra e la tensione di riferimento (Z) non sono standard, devono essere fornite come segue:
(ad esempio la tensione di riferimento 5V e la tensione del segnale 3V devono essere espresse come -5/3)
Precauzioni per l'uso
Fornire correttamente l'alimentazione, durante l'accensione, collegare accuratamente i poli positivo e negativo dell'alimentazione per evitare il burnout.
Durante l'assemblaggio, la parte inferiore del prodotto deve aderire strettamente alla scheda del circuito in modo da evitare danni ai pin e, se necessario, deve essere aggiunta una disposizione antiurto.
Non piegare i piedini per evitare che l'isolatore si rompa, che influiscono sulle proprietà di tenuta.
Quando l'utente effettua un ordine per il prodotto, gli indici dettagliati delle prestazioni elettriche devono fare riferimento allo standard aziendale pertinente.
Sincro/Resolver al convertitore digitale
(Serie HSDC/HRDC211)
1. Caratteristiche (vedi Fig. 1 per la vista esterna e Tabella 1 per i modelli)
Frequenza di eccitazione: 50 Hz, 400 Hz, 2,6 kHz
Risoluzione: 10 bit, 12 bit, 14 bit
Alta velocità di tracciamento
L'ingresso non standard è regolabile tramite resistenza esterna o regolato nell'estremità di ingresso del prodotto
Uscita in tensione CC direttamente proporzionale alla velocità angolare
Compatibile con la serie SDC1700 dell'azienda americana AD
Dimensioni: 79,4 × 66,7 × 11,8 mm2
Peso: 108 g
Fig. 1 Vista esterna della serie HSDC/HRDC211 Tabella 1 Modelli di prodotto
12 bit 14 bit
Sincro Risolutore Sincro Risolutore
HSDC2112-412 HRDC2112-418 HSDC2114-412 HRDC2114-418
HSDC2112-411 HRDC2112-414 HSDC2114-422 HRDC2114-414
HRDC 2112N HSDC2114-411 HRDC 2114N
2. Ambito di applicazione
Servosistema; sistema di antenne; misurazione dell'angolo; tecnologia di simulazione; controllo dell'artiglieria; controllo di macchine utensili industriali
3. Schema
Questa serie è un sincro/resolver digitale a convertitore di struttura modulare con convertitore di isolamento SCOTT a stato solido integrato, progettato secondo il principio del servo di tipo II, e può realizzare un monitoraggio e una conversione continui.
La potenza operativa è di ±15 V e +5 V CC. Esistono due tipi di segnale di uscita: sincro a tre linee e segnale di riferimento (convertitore SDC) o resolver a quattro linee e segnale di riferimento (convertitore RDC); l'uscita adotta codici digitali paralleli del sistema binario.
4. Prestazioni elettriche (Tabella 2, Tabella 3)
Tabella 2 Condizioni nominali e condizioni operative consigliate
Massimo valore di valutazione assoluto Tensione di alimentazione Vs: ± 17,5V
Tensione di alimentazione logica: +7V
Intervallo di temperatura di conservazione: -65 ℃ ~ + 150 ℃
Condizioni Operative Raccomandate Tensione di alimentazione +Vs: ±15V
Tensione di alimentazione logica 5V VL: ±5V
Valore effettivo della tensione di riferimento VRef: 11.8V, 26V, 115V
Valore effettivo della tensione del segnale Vi: 11,8V, 26V, 90V
Frequenza di riferimento f*: 50 Hz, 400 Hz, 2,6 kHz
Intervallo di temperatura di esercizio TA: 0~70℃, -40~+85℃
Nota: * indica che può essere personalizzato secondo le esigenze dell'utente.
5. Principio di funzionamento
Il segnale di ingresso sincronizzato (o segnale di ingresso del resolver) viene convertito nel segnale ortogonale attraverso l'isolamento differenziale interno:
V1-KE0sinθ sinωt,V2-KE0cosθ sinωt
Tabella 3 Caratteristiche elettriche
Caratteristiche HRDC/HSDC2110 HRDS/HSDC2112 HRDC/HSDC2114 Unità Osservazioni
±10% di fluttuazione del segnale e della tensione di riferimento
Precisione ±10% di fluttuazione della frequenza operativa ±22 ±8,5 ±5.3 Minuto angolare
±5% di fluttuazione dell'alimentazione
5(50Hz) 5(50Hz) 1,38 (50 Hz)
Velocità di tracciamento 36(400Hz) 36(400Hz) 12 (400 Hz) giri/sec
75 (2,6 kHz) 75 (2,6 kHz) 25 (2,6 kHz)
Risoluzione Codice digitale parallelo binario 10 12 14 po
Segnale e frequenza di riferimento 50, 400, 2.6k Hz Opzionale
Valore effettivo della tensione di ingresso di riferimento 11.8, 26, 90 V Opzionale
Valore effettivo della tensione di ingresso di riferimento 11.8, 26, 115 V Opzionale
Impedenza di ingresso del segnale Segnale 90V Unica estremità 100 kΩ
Differenziale 200 kΩ
Segnale 26V Unica estremità 28 kΩ
Differenziale 56 kΩ
Segnale 11,8V Unica estremità 13 kΩ
Differenziale 26 kΩ
Impedenza di ingresso di riferimento Riferimento 115V Unica estremità 127 kΩ
Differenziale 254 kΩ
Riferimento 26V Unica estremità 28 kΩ
Differenziale 56 kΩ
Riferimento 11,8V Unica estremità 13 kΩ
Differenziale 26 kΩ
Risposta al passo 50 Hz 1500 max
ms
400 Hz 125 max
2,6 kHz 75 max
Tensione di alimentazione +VS +15V 18
mA
-VS +15V 18
VL +5V 2
Impegnato Larghezza di impulso 200~600 ns
Segnale Capacità di carico 3 max TTL
Output digitale VOH 2,4 minuti V
VOL 0,4 max V
Capacità di carico 3 max TTL
Dove, θ è l'angolo di input simulato.
Il segnale ortogonale viene moltiplicato per l'angolo digitale binario φ nel contatore interno reversibile nel moltiplicatore della funzione seno-coseno e si ottiene una funzione di errore:
KE0sinθ cosφ sinωt-KE0cosθ sinφ sinωtu003dKE0sin(θ-φ) sinωt
I segnali vengono inviati all'oscillatore controllato in tensione dopo l'amplificazione, la discriminazione di fase e la filtrazione di integrazione, se θ-φ≠0, l'oscillatore controllato in tensione emetterà un impulso per modificare i dati nel contatore reversibile, fino a quando θ-φ diventa zero entro la precisione di il convertitore, durante questo processo, il convertitore tiene costantemente traccia del cambiamento dell'angolo di ingresso θ. Per il principio di funzionamento, vedere la Fig. 2.
Funzione di trasferimento: di seguito sono riportati i parametri per la funzione di trasferimento di HSDC2112 e HSDC2114 (400Hz), per altri modelli contattare direttamente il produttore.
Fig.2 Schema a blocchi del principio di funzionamento del convertitore
HSDC2112 (400Hz)
θout(S)/θin(S)u003d
HSDC2114 (400 Hz)
θout(S)/θin(S)u003d
(1) Trasferimento dati
Esistono due metodi per leggere i dati validi del convertitore come segue:
modalità (lettura sincrona):
Imposta su "0" logico, a questo punto il convertitore interromperà il tracciamento. Attendere 1µs, i dati di uscita si stabilizzano. Leggi i dati, in questo momento, i dati letti sono i dati validi in questo frangente (ritardo di 1 µs). Imposta su "1" logico, in questo momento, il convertitore ricomincerà a tracciare per prepararsi alla lettura dei successivi dati validi.
Modalità occupato (lettura asincrona):
In caso di modalità di lettura asincrona, è logico "1" o vuoto, l'anello interno del convertitore è sempre in stato di tracciamento. Se il loop interno è in uno stato stabile o se i dati di uscita sono validi deve essere determinato attraverso lo stato del segnale Occupato, quando il segnale Occupato è ad alto livello, significa che i dati sono in fase di conversione e i dati in questo momento sono dati non validi instabili; quando il segnale di occupato è a basso livello, i dati in questo momento sono dati validi stabili e possono essere letti. In modalità di lettura asincrona, l'uscita Occupato è un treno di impulsi di livello TTL, la larghezza tra è correlata alla velocità di rotazione, fare riferimento al diagramma di sequenza temporale 3 per il trasferimento dei dati.
Fig.3 Grafico della sequenza temporale del trasferimento dei dati
(2) Modalità di attenuazione del segnale di ingresso
Se il synchro o resolver utilizzato dall'utente è fuori standard, per far corrispondere la tensione del segnale di ingresso e la tensione di eccitazione in ingresso ai valori nominali del convertitore, l'utente può adottare il metodo della resistenza di attenuazione esterna collegata in serie, ovvero per ogni 1V eccedente il valore nominale, collegare in serie una resistenza da 1,1kΩ all'estremità di ingresso corrispondente. Quando si utilizza il convertitore, la resistenza in serie a ciascun terminale deve essere accuratamente selezionata e fornita e deve essere adottato materiale di resistenza dello stesso lotto in modo da garantire la precisione di conversione del convertitore nell'ampio intervallo di temperatura, per ogni 0,1% di adattamento l'errore della resistenza in serie genererà un errore di conversione del minuto angolare di 1,7.
Si raccomanda dal produttore che sia preferibile avvisare il produttore di personalizzare il synchro o il resolver non standard secondo i parametri richiesti quando l'utente li utilizza.
6. Curva MTBF (Fig. 4)
Fig. 4 Curva della temperatura MTBF
(Nota: secondo GJB/Z299B-98, buone condizioni del terreno previste) 7. Designazione del perno (Fig. 5, Tabella 4)
Nota: ① la struttura sopra è adatta per HRDC2114
② Per SDC, nessun pin S4.
③ Per dispositivo a 12 bit, nessun pin 13 e 14, per dispositivo a 10 bit, nessun pin 11, 12, 13 e 14.
Fig. 5 Pin (vista dall'alto)
Tabella 4 Designazione dei pin
Spillo Simbolo Funzione Spillo Simbolo Funzione
1 D1 Bit di uscita digitale 1 (MSB) 15 Vel Uscita in tensione a velocità angolare
2 D2 Bit di uscita digitale 2 16 S4 Ingresso del segnale
3 D3 Bit di uscita digitale 3 17 S3 Ingresso del segnale
4 D4 Bit di uscita digitale 4 18 S2 Ingresso del segnale
5 D5 Bit di uscita digitale 5 19 S1 Ingresso del segnale
6 D6 Bit di uscita digitale 6 20 Impegnato Uscita segnale di occupato
7 D7 Bit di uscita digitale 7 21 Inibire l'ingresso del segnale
8 D8 Bit di uscita digitale 8 22 +15V +15V di alimentazione
9 D9 Bit di uscita digitale 9 23 GND GND
10 D10 Bit di uscita digitale 10 (LSB a 10 bit) 24 -15V -15V di alimentazione
11 D11 Bit di uscita digitale 11 25 +5V +5V di potenza
12 D12 Uscita digitale bit 12 (LSB a 10 bit) 26 RLo Ingresso segnale di riferimento di fascia bassa
13 D13 Bit di uscita digitale 13 27 RH Ciao Ingresso segnale di riferimento di fascia bassa
14 D14 Uscita digitale bit 14 (LSB a 10 bit)
Note: ① Alimentazione: +15V, +5V, GND.
② Uscita digitale binaria: rispettivamente 10 bit, 12 bit e 14 bit.
③ RHi, RLo: ingresso del segnale di eccitazione.
④ S1, S2, S3 e S4: ingresso segnale di synchro o resolver.(S4 non utilizzato per synchro)
⑤ Vel: segnale di velocità. È un segnale di tensione, il cui valore è proporzionale alla velocità di rotazione angolare dell'albero.
⑥ Occupato: segnale di occupato. Indica se i dati del convertitore sono in stato di aggiornamento. Quando Occupato è al livello alto, indica che il convertitore sta eseguendo la conversione dei dati, l'uscita dei dati in questo momento non è valida; quando Occupato è a livello basso, i dati nel convertitore sono stabili e l'uscita dei dati in questo momento è valida.
⑦ : Questo è un segnale di inibizione esterno. Con questo segnale, è possibile controllare lo stato di tracciamento interno, quando è logico "1", il convertitore è nello stato di tracciamento normale all'interno, in questo momento, il segnale Occupato indica se i dati di uscita sono validi o meno, quando è logico "0 ”, il convertitore interrompe temporaneamente il rilevamento dello stato, i dati di uscita rimangono stabili e sono dati di uscita validi. Quando è logico "1", il convertitore ricomincerà a tracciare (il tempo di ripristino massimo è approssimativamente uguale al tempo di risposta al gradino massimo). Questa spilla è stata tirata su dentro.
8. Tabella dei valori di peso (Tabella 5)
Tabella 5 Tabella dei valori di peso
Po Angolo Po Angolo Po Angolo
1(MSB) 180.0000 6 5.6250 11 0,1758
2 90.0000 7 2.8125 12 (per LSB a 12 bit) 0,0879
3 45.0000 8 1.4063 13 0,0439
4 22.5000 9 0,7031 14 (per LSB a 14 bit) 0,0220
5 11.2500 10 (per LSB a 10 bit) 0,3516
9. Schema di collegamento per applicazione tipica (Fig. 6)
(1) Collegamento del convertitore
±15V, +5V e GND devono essere collegati ai pin corrispondenti sul convertitore, notare che le polarità dell'alimentazione devono essere corrette, altrimenti il convertitore potrebbe danneggiarsi. Si consiglia di collegare un condensatore di bypass da 0,1μF e 6,8μF in parallelo tra ciascun terminale di alimentazione e la terra.
Gli ingressi di segnale devono corrispondere alla fase di eccitazione, la loro fase è la seguente:
RHi~RLo: VRsinωt
Per il sincronismo:
Per S1~S3: sinθ sinωt
Per S3~S2: sin(θ+120o) sinωt
Per S2~S1: sin(θ+240o) sinωt
Per il risolutore:
S1~S3为: sinθ sinωt
S2~S4为: cosθ sinωt
Fig. 6 Schema di collegamento per applicazione tipica
Nota: nessun segnale di ingresso di RHi, RLo, S1, S2, S3 e S4 può essere collegato ad altri pin per timore di danni al dispositivo.
(2) Interfaccia con il computer
Al fine di prevenire la raccolta dei dati durante il livello elevato dell'impulso Occupato e per garantire l'acquisizione di dati validi, è possibile adottare la connessione in Fig.7:
(3) Applicazione del convertitore
Oltre ad essere utilizzato direttamente nella misurazione precisa dell'angolo di rotazione del sincronizzatore o del resolver, il convertitore dell'angolo dell'albero può anche costituire un sistema di misurazione a due velocità o un altro sistema di controllo della misurazione digitale di maggiore precisione.
Oltre ad essere utilizzato direttamente nella misurazione precisa dell'angolo di rotazione del sincronizzatore o del resolver, il convertitore dell'angolo dell'albero può anche costituire un sistema di misurazione a due velocità o un altro sistema di controllo della misurazione digitale di maggiore precisione.
La Fig. 8 è un esempio di sistema a due velocità composto dal convertitore. Il sistema a due velocità stabilito sul principio della combinazione di misura grossolana e precisa ha una maggiore precisione di conversione, la figura mostra il sistema di conversione a due velocità composto da due sincronizzatori (o resolver) accoppiati tramite il riduttore, due convertitori SDC e due -velocità processore HTSL19, la sua uscita raggiunge i 19 bit.
Fig.7 Un possibile circuito di interfaccia per computer esterno
Fig.8 Applicazione del sistema a due velocità della DSC
La Fig.9 mostra un servosistema di controllo digitale. Utilizza il circuito di feedback negativo del controllo digitale costituito da SDC per ottenere un controllo preciso dell'angolo di rotazione.
10. Specifiche della confezione (unità: mm) (Fig. 10)
Fig.9 Servosistema di controllo digitale
Fig.10 Vista esterna del pacco
11. Tasto di numerazione dei pezzi (Fig. 11)
Fig.11 Legenda per la numerazione dei pezzi
Nota: quando la tensione del segnale di cui sopra e la tensione di riferimento (Z) non sono standard, devono essere fornite come segue:
(es. tensione di riferimento 5V e tensione di segnale 3V sono espressi come -5/3)
Precauzioni per l'uso
Fornire correttamente l'alimentazione, durante l'accensione, collegare accuratamente i poli positivo e negativo dell'alimentazione per evitare il burnout.
Durante l'assemblaggio, la parte inferiore del prodotto deve aderire strettamente alla scheda del circuito in modo da evitare danni ai pin e, se necessario, deve essere aggiunta una disposizione antiurto.
Quando l'utente effettua un ordine per il prodotto, gli indici dettagliati delle prestazioni elettriche devono fare riferimento allo standard aziendale pertinente.
Sincro/Resolver al convertitore digitale
(Serie HSDC/HRDC27)
1. Caratteristiche (vedi Fig. 1 per la vista esterna e Tabella 1 per i modelli)
Risoluzione: 12 bit, 14 bit
Alta velocità di tracciamento
Integrazione ibrida, pacchetto custodia in metallo
Uscita latch a tre stati
Con uscita Vel del segnale di velocità
Incompletamente compatibile con la serie AD1740
Dimensioni: 45,39 × 29,0 × 7,2 mm2
Peso: 26 g
Fig. 1 Vista esterna della serie HSDC/HRDC27 Tabella 1 Modelli di prodotto
12 bit 14 bit
Sincro Risolutore Sincro Risolutore
HSDC2742 -412 HRDC2742 -414 HSDC2754 -612 HRDC2754 -414
HRDC2742 -418 HRDC2754 -418
HRDC2742 -618 HRDC2754 -618
HRDC2754 -666
HRDC2754 -614
2. Ambito di applicazione
Servosistema; sistema di antenne; misurazione dell'angolo; tecnologia di simulazione; controllo dei cannoni; controllo di macchine utensili industriali
3. Schema
La serie HSDC/HRDC27 è il convertitore digitale synchro/resolver per il tracciamento continuo di servo loop di tipo II, si aggancia e emette parallelamente dati codificati binari naturali a 12 o 14 bit con un pacchetto metallico dual-in-line a 32 linee, presenta il vantaggi di piccolo volume, leggerezza e alta affidabilità ecc., è ampiamente applicato in un sistema di controllo automatico come sistema radar, sistema di navigazione, ecc.
La potenza operativa è di +15V e +5V DC. I segnali di ingresso sono divisi in due tipi: segnale di eccitazione e sincro a 3 linee (convertitore SDC) o segnale di eccitazione e resolver a 4 linee (convertitore RDC) L'uscita è un codice digitale parallelo binario. Tabella 2 Condizioni nominali e condizioni operative consigliate
Massimo valore di valutazione assoluto Tensione di alimentazione Vs: ± 17,25V
Tensione logica VL: +5,5V
Intervallo di temperatura di conservazione: -55 ℃ ~ 125 ℃
Condizioni Operative Raccomandate Tensione di alimentazione Vs: ±15V
Tensione di alimentazione VL: +5V
Valore effettivo della tensione di riferimento VRef: ±10% del valore nominale
Valore effettivo della tensione del segnale Vi: ±5% del valore nominale
Frequenza di riferimento f*: 50Hz~2.6kHz
Intervallo di temperatura di esercizio TA: -40~+85℃,-55~+105℃
Nota: * indica che può essere personalizzato secondo le esigenze dell'utente.
4. Performance tecnica (Tabella 2, Tabella 3)
Tabella 3 Caratteristiche elettriche
Caratteristiche Standard militare aziendale HSDC/HRDC2742 (Q/HW30859-2006) Standard militare aziendale HSDC/HRDC2754 (Q/HW30832-2006) Unità Osservazioni
Prestazioni del convertitore Precisione ±8,5 ±5.3 Minuto angolare
Velocità di tracciamento 25(min) 12(min) rps A 400 Hz di eccitazione
Risoluzione 12 14 po
Segnale e frequenza di riferimento 50~2600 50~2600 Hz Opzionale*
Tensione di ingresso del segnale 11.8, 26, 90 11.8, 26, 90 V Opzionale**
Tensione di ingresso di riferimento 11.8, 26, 115 11.8, 26, 115 V Opzionale**
Risposta al passo 100 150 ms
Costante di accelerazione 82000 39000 s-2
Consumo di energia 0,86 max 1,3 max W
Larghezza impulso occupato 1 massimo 1 massimo µs
Capacità di carico dell'uscita digitale 2 max 2 max TTL
Note: * Per il convertitore con altra frequenza operativa come 50Hz, 2kHz ecc., i suoi parametri dinamici sono diversi, che possono essere forniti in base alle esigenze dell'utente;
** indica che può essere personalizzato secondo le esigenze dell'utente.
5. Principio di funzionamento (Fig. 2)
Il segnale di ingresso sincronizzato (o segnale di ingresso del resolver) viene convertito nel segnale ortogonale attraverso l'isolamento differenziale interno:
V1u003dKE0sinθ sinωt,V2u003dKE0cosθ sinωt
Dove, θ è l'angolo di input simulato.
Questi due segnali e l'angolo digitale φ del contatore interno reversibile vengono moltiplicati nel moltiplicatore delle funzioni seno e coseno e vengono trattati in errore:
KE0sinθ cosφ sinωt-KE0cosθ sinφ sinωtu003dKE0sin(θ-φ) sinωt
I segnali vengono inviati all'oscillatore controllato in tensione dopo amplificazione, discriminazione di fase, filtrazione di integrazione, se θ-φ≠0, l'oscillatore controllato in tensione modifica i dati nel contatore reversibile con gli impulsi di uscita fino a quando θ-φ diventa zero entro la precisione del convertitore, durante questo processo, il convertitore tiene costantemente traccia del cambiamento dell'angolo di ingresso θ.
Fig.2 Schema a blocchi per principio di funzionamento
Funzione di trasferimento del convertitore
Funzione ad anello chiuso
Metodo di trasferimento dei dati e sequenza temporale
Esistono due metodi per leggere i dati effettivi nel convertitore: lettura sincrona e lettura asincrona.
(1) Modalità inibizione (lettura sincrona):
R: il convertitore è collegato con bus a 16 bit. Bysel è connesso con la logica “1”.
è impostato a “0” logico da “1” logico (blocco dati), attendere 1μs; impostato su "0" logico, il latch all'interno del convertitore consente l'uscita dei dati; leggere dati a 12 o 14 bit; impostare Inhibit su "1" logico in modo da essere pronti per la lettura dei successivi dati validi (vedere il diagramma della sequenza temporale per il trasferimento a 16 bit).
B: il convertitore è collegato al bus a 8 bit, i bit D1~D8 sono collegati al bus dati e il resto è vuoto.
è impostato a “0” logico da “1” logico (blocco dati), attendere 1μs; impostato su "0" logico, i dati di latch all'interno del convertitore consentono l'uscita; se Byse1 è impostato su “1” logico, il convertitore legge direttamente i dati a 8 bit superiori, se Byse1 è impostato su “0” logico, il convertitore legge i bit rimanenti, aggiunge automaticamente zero per bit incompleti; impostare su "1" logico per prepararsi alla lettura dei successivi dati validi (vedere Fig. 3 e Fig. 4 per la sequenza temporale di trasferimento a 8 bit).
Fig. 3 Diagramma della sequenza temporale del trasferimento del bus a 16 bit
Fig. 4 Diagramma della sequenza temporale del trasferimento del bus a 8 bit
(2) Modalità occupato (lettura asincrona)
In modalità di lettura asincrona, è impostato su "1" logico o è vuoto, se il circuito interno è nello stato stabile o se i dati di uscita sono validi deve essere determinato attraverso lo stato del segnale Occupato Occupato. Quando il segnale Occupato è ad alto livello, indica che i dati sono in fase di conversione e che i dati in questo momento sono dati instabili e non validi; quando il segnale di occupato è a basso livello, indica che la conversione dei dati è stata completata, i dati in questo momento sono stabili e validi e possono essere letti. Una volta che si verifica un livello alto in Occupato durante la lettura, la lettura di questo tempo non è valida. In modalità di lettura asincrona, l'uscita Occupato è un treno di impulsi di livello TTL, la larghezza tra è correlata alla velocità di rotazione. Allo stesso modo, ci sono anche due metodi di utilizzo del bus a 8 bit e del bus a 16 bit, in caso di output di dati valido, anche la lettura dei dati è controllata da , fare riferimento al diagramma di sequenza temporale per il trasferimento dei dati (Fig.5 e Fig.6)
Fig5 Diagramma della sequenza temporale per il trasferimento del bus a 16 bit
Fig.6 Diagramma della sequenza temporale per il trasferimento del bus a 8 bit
6. Curva MTBF (Fig. 7)
Fig. 7 Curva della temperatura MTBF 7. Designazione del perno (Fig. 8, Tabella 3)
Fig. 8 Perni (vista dal basso)
(Nota: secondo GJB/Z299B-98, buone condizioni del terreno previste)
Tabella 3 Designazione dei pin
Spillo Simbolo Funzione Spillo Simbolo Funzione
1~14 D1~D14 Output digitale 24 Bisello Seleziona bit
15 RLo Ingresso segnale di eccitazione 25 NC Lascia scollegato
16 RH Ciao Ingresso segnale di eccitazione 26 Gating dei dati
17 S4 Ingresso del segnale 27 Impegnato Uscita a impulsi occupati
18 S3 Ingresso del segnale 28 Controllo del blocco dei dati
19 S2 Ingresso del segnale 29 +15V Potenza
20 S1 Ingresso del segnale 30 GND Terra di alimentazione
21 NC Lascia scollegato 31 -15V Potenza
22 Vel Uscita tensione di velocità 32 +5V Potenza
23 Caso Caso a terra
Note: ① Per il convertitore a 12 bit, lasciare i pin 13 e 14 scollegati.
② Per il convertitore SDC, lasciare il pin 17 scollegato.
③ Alimentazione: ±15V, +5V, GND, l'alimentazione non deve essere collegata al contrario, altrimenti i dispositivi verranno danneggiati.
④ Uscita digitale binaria: è divisa in uscita a 12 bit e 14 bit.
⑤ RHi, RLo: ingresso del segnale di eccitazione.
⑥ S1, S2, S3, S4: ingresso segnale di synchro/resolver (S4 è lasciato scollegato per synchro).
⑦ Occupato: segnale di occupato
Questo segnale indica se il numero binario emesso dal convertitore è valido o meno. Quando Occupato è al livello alto, indica che il convertitore sta eseguendo la conversione dei dati, l'uscita dei dati in questo momento non è valida; quando Occupato è a livello basso, i dati nel convertitore sono stati stabili e l'uscita dei dati in questo momento è valida.
⑧ Gate dei dati
Questo pin è il pin di ingresso della logica di controllo, la sua funzione è quella di inviare i dati al convertitore per realizzare il controllo a tre stati. Il livello basso è valido, i dati di uscita del convertitore occupano il bus dati. Quando è ad alto livello, il pin di uscita dati del convertitore è in tre stati, il dispositivo non occupa il bus.
⑨ Controllo blocco dati (segnale di inibizione)
Questo pin è il pin di ingresso della logica di controllo, la sua funzione è quella di inviare i dati all'esterno del convertitore per realizzare un controllo di blocco o bypass opzionale.
A livello alto, i dati di uscita del convertitore escono direttamente senza latch; a livello basso, i dati di uscita del convertitore vengono bloccati, i dati non vengono aggiornati, ma il loop interno non viene interrotto e il tracciamento funziona tutto il tempo. ha collegato una resistenza di pull-up all'interno del convertitore (se il dispositivo utilizza il bus dati, ovvero quando emette i dati dipende dallo stato di ).
⑩ Byse1: fine selezione bit
Si tratta di un'estremità di controllo appositamente progettata per il collegamento del convertitore con bus dati a 8 bit o bus dati a 16 bit. Quando il convertitore è collegato con un bus dati a 16 bit, Byse1 viene richiamato internamente, il convertitore può emettere direttamente dati a 12 o 14 bit; quando il convertitore è collegato con un bus dati a 8 bit, Byse1 è a livello alto, il convertitore emette dati di 8 bit superiori (D1~D8), quando Byse1 è a livello basso, il convertitore emette i dati dei bit rimanenti (copiando i dati dei bit rimanenti al bit D1~D8) e riempie automaticamente lo zero per i dati dei bit brevi. Va notato che è necessario collegare D1~D8 solo quando il convertitore è collegato con un bus dati a 8 bit, gli altri pin di dati vengono lasciati scollegati.
8. Tabella dei valori di peso (Tabella 4)
Tabella 4 Tabella dei valori di peso
Po Angolo Po Angolo Po Angolo
1(MSB) 180.0000 6 5.6250 11 0,1758
2 90.0000 7 2.8125 12 (per LSB a 12 bit) 0,0879
3 45.0000 8 1.4063 13 0,0439
4 22.5000 9 0,7031 14 (per LSB a 14 bit) 0,0220
5 11.2500 10 0,3516
9. Schema di collegamento per applicazione tipica (Fig. 9)
Oltre ad essere utilizzato direttamente nella misurazione precisa dell'angolo di rotazione del sincronizzatore o del resolver, il convertitore dell'angolo dell'albero può anche costituire un sistema di misurazione a due velocità o un altro sistema di controllo della misurazione digitale di maggiore precisione. La Fig. 9 è un esempio di sistema a due velocità composto dal convertitore. Il sistema a due velocità basato sul principio della combinazione di misura grossolana e precisa ha una maggiore precisione di conversione, la Fig.9 mostra il sistema di conversione a due velocità composto da due sincronizzatori (o resolver) accoppiati tramite il riduttore, due convertitori SDC e un processore a due velocità HTSL19, la sua uscita raggiunge i 19 bit.
Fig. 9 Applicazione del sistema a due velocità della DSC
10. Specifiche della confezione (unità: mm) (Fig. 10)
Fig.10 Specifiche del pacchetto
Tabella 5 Materiali del caso
Modello di custodia Intestazione Placcatura dell'intestazione Coperchio Placcatura di copertura Materiale dei perni Placcatura a perno Stile di tenuta Osservazioni
UP4529- 32a Kovar (4J29) Au Lega Fe-Ni (4J42) Au Kovar (4J29) Au Imballaggio abbinato Il rivestimento del pin 23 è Au
Nota: la temperatura dei pin di saldatura non deve superare i 300 ℃ entro 10 secondi.
11. Tasto di numerazione dei pezzi (Fig. 11)
Fig.11 Legenda per la numerazione dei pezzi
Nota: quando la tensione del segnale di cui sopra e la tensione di riferimento (Z) non sono standard, devono essere fornite come segue:
(ad esempio la tensione di riferimento 5V e la tensione del segnale 3V devono essere espresse come -5/3)
Precauzioni per l'uso
Fornire correttamente l'alimentazione, durante l'accensione, collegare accuratamente i poli positivo e negativo dell'alimentazione per evitare il burnout.
Collegamento del convertitore
±15V, +5V e GND devono essere collegati ai pin corrispondenti sul convertitore, notare che le polarità dell'alimentazione devono essere corrette, altrimenti il convertitore potrebbe danneggiarsi. Si consiglia di collegare la capacità di bypass di 0,1μF e 6,8μF in parallelo tra ciascun terminale di alimentazione e la terra. Il segnale e la sorgente di eccitazione possono essere collegati a S1, S2, S3 e S4 e RHi e RLo terminano con un errore del 5%. È necessario collegare solo D1~D8 quando il convertitore è collegato con un bus dati a 8 bit, gli altri pin dati sono lasciati liberi.
Quando il convertitore è collegato al bus dati a 16 bit, D1~D14 o (D1~D12) devono essere tutti collegati.
L'ingresso del segnale deve corrispondere alla fase dell'eccitazione in modo che possano essere correttamente collegati al convertitore, le loro fasi sono le seguenti:
RHi~RLo: VRsinωt
Per il sincronismo:
Per S1~S3: sinθ sinωt
Per S3~S2: sin(θ+120o) sinωt
Per S2~S1: sin(θ+240o) sinωt
Per il risolutore:
Per S1~S3: sinθ sinωt
Per S2~S4: cosθ sinωt
Nota: nessun segnale di ingresso di RHi, RLo, S1, S2, S3 e S4 può essere collegato ad altri pin per timore di danni al dispositivo.
Durante l'assemblaggio, la parte inferiore del prodotto deve aderire strettamente alla scheda del circuito in modo da evitare danni ai pin e, se necessario, deve essere aggiunta una disposizione antiurto.
Quando l'utente effettua un ordine per il prodotto, gli indici dettagliati delle prestazioni elettriche devono fare riferimento allo standard aziendale pertinente.
Convertitore R/D (H2S80)
1. Caratteristiche (vedi Fig. 1 per la vista esterna e Tabella 1 per i modelli)
Risoluzione opzionale a 10, 12, 14 e 16 bit
Tasso di tracciamento: max. 1040 giri/sec
Parametri dinamici: progettati dall'utente
Uscita a latch a tre stati ad alta impedenza di ingresso
Pacchetto DDIP sigillato in metallo resistente alla nebbia salina a 40 fili
Compatibile con la serie ADC2S80 dell'azienda americana AD
Dimensioni: 53 × 20 × 5,3 mm2
Peso: 18 g
Fig. 1 Vista esterna di H2S80 2. Ambito di applicazione
Servosistema missilistico; sistema elettronico di controllo del volo; sistema di controllo radar; sistema di navigazione navale; monitoraggio dell'antenna; sistema di controllo dell'artiglieria; macchine utensili a controllo numerico (CNC); sistema robotico.
3. Schema
Il convertitore R/D a tracciamento continuo del circuito servo H2S80 tipo II è progettato e prodotto adottando il processo MCM, il dispositivo kernel è il chip speciale sviluppato indipendentemente dalla nostra azienda, la disposizione dei pin è compatibile con il prodotto AD2S80 della società americana AD, 10, 12, Uscita dati binaria naturale parallela a 14 e 16 bit (risoluzione opzionale), pacchetto custodia ermetica in metallo DIL a 40 linee, presenta i vantaggi di elevata precisione, basso consumo energetico, volume ridotto, peso leggero e alta affidabilità ecc. e può essere ampiamente usato per il controllo elettronico del sistema come di aeroplani, navi, artiglieria, missili, radar, carri armati ecc. Tabella 1 Condizioni nominali e condizioni operative consigliate
Massimo valore di valutazione assoluto Tensione di alimentazione logica VL: 7V
Tensione di alimentazione Vs: ± 13,5V
Tensione del segnale Vi: 2V±20%
Tensione di riferimento: VRef: 2V±20%
Frequenza operativa f: 50~20000Hz
Temperatura di conservazione Tstg: 65~150 ℃
Condizioni Operative Raccomandate Tensione di alimentazione logica VL: 5±0,5V
Tensione di alimentazione Vs: ±12±0,75V
Tensione del segnale Vi: 2V±10%
Tensione di riferimento: VRef: 2V±10%
Frequenza operativa f: 50~20000Hz
Intervallo di temperatura di esercizio (TA): 55 ~ 125 ℃
4. Caratteristiche elettriche (Tabella 1, Tabella 2)
Tabella 2 Caratteristiche elettriche
Caratteristiche H2S80 Unità Caratteristiche H2S80
Standard militare aziendale (Q/HW30974-2007) Unità
Risoluzione 10, 12, 14 e 16 bit opzionali
±21 minuti+1LSB (10 bit) Tensione del segnale 2V±10% V
±8 minuti+1LSB(12 bit) Tensione di riferimento 2V±10% V
Precisione ±4 minuti+1LSB(14 bit) po Livello di ingresso digitale Compatibile con TTL
±2 minuti+1LSB(16 bit)
Velocità di tracciamento 0~1040 (10 bit) giri/sec Livello di uscita digitale Logica alta ≥3,3
Logica bassa ≤0,7 V
0~260 (12 bit)
0~65 (14 bit)
0~16 (16 bit) Potenza +12, 12, +5 V
Intervallo di frequenza operativa 50~20000 Hz Consumo di energia 450 mW
5. Principio di funzionamento (Fig. 2 e Fig. 3)
Il segnale di ingresso di synchro (o resolver) viene convertito nel segnale ortogonale attraverso l'isolamento differenziale interno:
Vsin-KE0sin(ωt+α) sinθ (peccato)
Vcos-KE0sin(ωt+α) cosθ (cos)
Dove, θ è l'angolo di ingresso analogico.
Questi due segnali e l'angolo digitale φ del contatore interno reversibile vengono moltiplicati nel moltiplicatore delle funzioni seno e coseno e vengono trattati in errore:
KE0sin(ωt+α) (sinθ cosφ -cosθ sinφ)
cioè KE0sin(ωt+α) sin(θ-φ)
Viene inviato all'oscillatore controllato in tensione dopo l'amplificazione, la discriminazione di fase e la filtrazione di integrazione, se θ-φ≠0, l'oscillatore controllato in tensione emetterà gli impulsi e il contatore reversibile li conta fino a quando θ-φ diventa zero entro la precisione del convertitore. In questo processo, il convertitore tiene costantemente traccia del cambiamento dell'angolo di input.
Fig.2 Schema a blocchi per principio di funzionamento
Modalità di lettura:
Sono disponibili due metodi per il trasferimento dei dati:
(1) modalità
Dopo 640 ns di livello logico basso, i dati di uscita sono validi e il convertitore realizza il trasferimento dei dati tramite Abilita. Dopo il rilascio di Inhibit, il sistema genererà automaticamente un impulso con la sua ampiezza uguale a quella di Busy pulse per l'aggiornamento dei dati.
(2) Modalità busto:
Sul fronte di salita dell'impulso Occupato, il contatore reversibile a tre stati conta; al fronte discendente dell'impulso Busy genera internamente un impulso latch con larghezza uguale a quella dell'impulso Busy per l'aggiornamento dei dati del latch a tre stati, la sequenza temporale di trasferimento dei dati è mostrata in Fig.3, in altre parole , dopo 600 ns di logica occupata bassa, il trasferimento stabile dei dati è valido. Nel processo di lettura, una volta che si verifica un livello alto in Occupato, la lettura di questo tempo non è valida. In modalità di lettura asincrona, l'uscita Occupato è un treno di impulsi di livello CMOS, l'ampiezza dell'impulso è correlata alla velocità di rotazione.
Fig. 3 Diagramma della sequenza temporale per la lettura del bus
6. Curva MTBF (Fig. 4)
Fig. 4 Curva della temperatura MTBF 7. Designazione del perno (Fig. 5, Tabella 3)
Fig. 5 Perni (vista dal basso)
(Nota: secondo GJB/Z299B-98, buone condizioni del terreno previste)
Tabella 3 Designazione dei pin
Spillo Simbolo Funzione Spillo Simbolo Funzione Spillo Simbolo Funzione
1 Rif/I Ingresso segnale di riferimento 15 D7 Uscita digitale 7 29 DG Terra digitale ⑧
2 Demo/I Ingresso discriminatore 16 D8 Uscita digitale 8 30 SC1 Ingresso selezione risoluzione ①
3 Acer/O Ingresso errore CA 17 D9 Uscita digitale 9 31 SC2
4 cos Ingresso segnale coseno 18 D10 Uscita digitale 10 32 NC Lascia scollegato
5 AG Terra analogica ⑧ 19 D11 Uscita digitale 11 33 Impegnato Uscita segnale di occupato ④
6 SG Massa del segnale ⑧ 20 D12 Uscita digitale 12 34 Direzione Uscita segnale direzione di conteggio ⑤
7 peccato Ingresso segnale sinusoidale 21 D13 Uscita digitale 13 35 Ripcl Uscita segnale a bit zero ⑥
8 +VS Alimentazione +12V ⑦ 22 D14 Uscita digitale 14 36 -VS -12V alimentazione ⑦
9 D1 Uscita digitale 1 (MSB) 23 D15 Uscita digitale 15 37 Vco/I Ingresso oscillatore controllato in tensione
10 D2 Uscita digitale 2 24 D16 Uscita digitale bit 16 (LSB) 38 Inte/I Ingresso integratore
11 D3 Uscita digitale 3 25 +VL +5V di alimentazione ⑦ 39 Inte/O Uscita integratore
12 D4 Uscita digitale 4 26 Abilita ingresso segnale ② 40 Demo/O Uscita discriminatore
13① D5 Uscita digitale 5 27 NC Lascia scollegato
14① D6 Uscita digitale 6 28 Ingresso segnale statico ③
Nota: ① SC1 e SC2 per l'ingresso di selezione della risoluzione, sono stati collegati internamente con una resistenza di pull-up.
Risoluzione SC1 SC2
10 0 0
12 0 1
14 1 0
16 1 1
② abilita l'ingresso del segnale, questo pin è il pin di ingresso logico del controllo del gating dei dati, la sua funzione è di eseguire il controllo a tre stati esternamente sui dati di uscita del convertitore. Il livello basso è valido, i dati di uscita del convertitore occupano il bus dati. Quando è ad alto livello, il pin di uscita dati del convertitore appare in stato di alta impedenza, il dispositivo non occupa il bus. Il tempo di ritardo di abilitazione e rilascio è di 600 ns (max).
③ ingresso del segnale statico, questo pin è il pin di ingresso della logica di controllo del latch dei dati, la sua funzione è quella di eseguire il controllo di selezione del latch o bypass dei dati di uscita del convertitore. A livello alto, i dati di uscita del convertitore vengono emessi direttamente senza latch; a livello basso, i dati di uscita del convertitore vengono bloccati, i dati non vengono aggiornati, ma il loop interno non viene interrotto e il tracciamento funziona tutto il tempo, è stato collegato internamente con una resistenza di pull-up. Dopo 600ns (max) di ritardo del fronte discendente del segnale statico, i dati diventano stabili (se il dispositivo occupa o meno il bus dati, ovvero quando emette i dati dipende dallo stato di Enable).
④ Uscita segnale “Occupato”, questo segnale indica se l'uscita del codice binario del convertitore è valida o meno. Quando Occupato è al livello alto, indica che il convertitore sta eseguendo la conversione dei dati, l'uscita dei dati in questo momento non è valida; quando Occupato è a livello basso, indica che i dati nel convertitore sono stati stabili e l'uscita dati in questo momento è valida, l'ampiezza dell'impulso è 400 ns.
⑤ Direzione: uscita del segnale della direzione di conteggio, il livello alto indica che il convertitore sta aggiungendo il conteggio e il livello basso indica che il convertitore sta deducendo il conteggio.
⑥ RIPCLK: Uscita segnale zero: quando i dati di uscita aumentano da tutto “1” a tutto “0”, o i dati di uscita decrescono da tutto “0” a tutto “1”, l'uscita è un impulso positivo, l'ampiezza dell'impulso è 200μs .
⑦ Potenza: +VS
Alimentazione +12V
12 mA
-VS -12V di alimentazione 18 mA
+VL +5V di potenza 10 mA
⑧ Terra: la terra analogica AG e la terra digitale DG devono essere collegate esternamente alla terra di alimentazione.
8. Schema di collegamento per applicazione tipica (Fig. 6)
Fig. 6 Schema di collegamento per applicazione tipica
(1) Impostazione del filtro
15kΩ≤R1u003dR2≤56kΩ
C1u003dC2u003d (unità R1: Ω; fRef è la frequenza del segnale della sorgente di eccitazione, unità: Hz)
(2) Impostazione del guadagno
R4u003d
EDCu003d160×10-3
u003d40×10-3
u003d10×10-3
u003d2,5×10-3 (risoluzione a 10 bit)
(risoluzione a 12 bit)
(risoluzione a 14 bit)
(risoluzione a 16 bit)
(3) Ingresso segnale di riferimento
R3u003d100kΩ
C3>
(4) Impostazione di max. tasso di tracciamento
T è il massimo velocità di tracciamento (unità: r/sec), ma non deve superare 1/16 della frequenza di riferimento. Per rendere il prodotto a max. la velocità di tracciamento e la tensione di velocità angolare raggiungono 8 V, è richiesto:
R6u003d
pu003d1024
u003d4096
u003d16384
u003d65536 (risoluzione a 10 bit)
(risoluzione a 12 bit)
(risoluzione a 14 bit)
(risoluzione a 16 bit) Tabella 4 Impostazione della velocità di tracciamento
Risoluzione Proporzione della frequenza di riferimento rispetto alla frequenza della larghezza di banda fBW
10 2.5:1
12 4: 1
14 6:1
16 7.5:1
(5) Impostazione del loop di selezione della larghezza di banda
La proporzione selezionata tra la frequenza di riferimento e la frequenza della larghezza di banda del prodotto non deve essere inferiore a quella specificata nella tabella 4.
Ad esempio: selezionare 50Hz per la risoluzione a 14 bit e la frequenza di riferimento 400Hz del prodotto.
C4u003d (unità di R6: kΩ)
C5u003d5×C4
R5u003d
(6) Impostazione del filtro VCo
C6u003d470pF,R7u003d68Ω
(7) Azzeramento
Per eliminare la deriva dello zero del prodotto, è possibile regolarlo tramite il potenziometro R9, il metodo è: cortocircuitare i pin 4 e 1 del prodotto, cortocircuitare i pin 7 e 6 (equivalenti a 0o angolo di ingresso), regolare il potenziometro R9 per azzerare tutti i dati di output del prodotto.
Per l'alimentatore collegato ai pin +VS e -VS, la sua tensione dovrebbe essere ±12V e non dovrebbe essere collegata in modo inverso. L'alimentazione logica digitale VL è collegata alla posizione di +5V. Tra l'alimentazione e la terra, collegare in parallelo un condensatore ceramico da 0,1 µF e un condensatore elettrolitico da 6,8 µF.
9. Specifiche della confezione (unità: mm) (Fig. 7, Tabella 5 e 6)
Fig. 7 Vista esterna e dimensioni dell'imballo Tabella 5 Specifiche del pacchetto
Simbolo Valore
min. Nominale Massimo
A 5.5
Φb 0,35 0,55
D 53.8
E 20.0
e 2.54
e1 15.24
L 5
Tabella 6 Materiali del caso
Modello di custodia Intestazione Placcatura dell'intestazione Coperchio Placcatura di copertura Materiale dei perni Placcatura a perno Stile di tenuta Osservazioni
UP5320- 40 4J42 Rivestimento Ni 4J42 Rivestimento chimico Ni 4J42 Rivestimento Au Imballaggio abbinato Base più tre perle di vetro massiccio
Nota: la temperatura dei pin di saldatura non deve superare i 300 ℃ entro 10 secondi.
10. Tasto di numerazione dei pezzi (Fig. 8)
Fig. 8 Legenda per la numerazione dei pezzi
Precauzioni per l'uso
Fornire correttamente l'alimentazione, durante l'accensione, collegare accuratamente i poli positivo e negativo dell'alimentazione per evitare il burnout.
Durante l'assemblaggio, la parte inferiore del prodotto deve aderire strettamente alla scheda del circuito in modo da evitare danni ai pin e, se necessario, deve essere aggiunta una disposizione antiurto.
Non piegare i piedini per evitare che l'isolatore si rompa, che influiscono sulle proprietà di tenuta.
Quando l'utente effettua un ordine per il prodotto, gli indici dettagliati delle prestazioni elettriche devono fare riferimento allo standard aziendale pertinente.
Sincro/Resolver al convertitore digitale
(Serie HSDC/HRDC1459)
1. Caratteristiche (vedi Fig. 1 per la vista esterna e Tabella 1 per i modelli)
Conversione dell'isolamento differenziale interno
Risoluzione a 16 bit
Precisione: 2 minuti angolari
Uscita latch a tre stati
Elevata velocità di tracciamento continuo
Pacchetto DDIP sigillato in metallo resistente alla nebbia salina a 36 fili
Pin-To-Pin compatibile con il modello SDC14560 della società DDC
Dimensioni: 48,2 × 20 × 5,3 mm3; peso: 17 g
Fig.1 Vista esterna della serie HSDC/HRDC1459
2. Ambito di applicazione
Sistema di servocomando militare; monitoraggio dell'antenna; sistema di controllo radar; sistema di navigazione per navi militari; sistema di controllo dei cannoni; sistema strumentale di volo; sistema elettronico dell'aviazione; macchina a controllo numerico computerizzato (CNC); tecnologia robotica.
3. Schema
La serie HSDC/HRDC1459 da synchro/resolver a convertitore digitale è un dispositivo di conversione integrato ibrido per il tracciamento continuo progettato sul principio del servo modello II. I prodotti di questa serie sono progettati e realizzati con il processo MCM, gli elementi principali adottano un chip speciale sviluppato in modo indipendente dal nostro istituto. La disposizione dei pin è compatibile con i prodotti della serie SDC14560 della società americana DDC, uscita dati latch a codice binario naturale parallelo a 16 bit, pacchetto metallico DIP a 36 fili totalmente sigillato, presenta i vantaggi di alta precisione, volume ridotto, basso consumo energetico, peso leggero e alta affidabilità ecc., e può essere ampiamente utilizzato in importanti armi strategiche e tattiche come aerei, navi militari, cannoni, missili, radar, carri armati, ecc.
4. Prestazioni elettriche (Tabella 1, Tabella 2)
Massimo valore di valutazione assoluto Tensione di alimentazione logica VL: +7V
Tensione di alimentazione Vs: ± 17,5V
Tensione segnale Vi: valore nominale ±20%
Tensione di riferimento VRef: valore nominale ±20%
Frequenza di funzionamento f: valore nominale ±20%
Temperatura di conservazione Tstg: -65~150 ℃
Condizioni Operative Raccomandate Tensione di alimentazione logica VL: 5±0,5V
Tensione di alimentazione Vs: ¡À15¡À0,75V
Tensione segnale Vi: valore nominale ±10%
Tensione di riferimento VRef: valore nominale ±10%
Frequenza di funzionamento f*: valore nominale ±10%
Intervallo di temperatura di esercizio (TA): -55~125℃
Nota: * indica che può essere personalizzato secondo le esigenze dell'utente.
Tabella 2 Caratteristiche elettriche
Caratteristiche Condizione
(VSu003d±15V, VLu003d+5V) Serie HSDC14569
Standard militare (Q/HW20725-2006)
min. Massimo
Risoluzione Codice digitale parallelo binario 16 bit
Precisione ±10% della tensione del segnale, della tensione di riferimento e del campo di fluttuazione della frequenza operativa -2 minuti angolari +2 minuti angolari
Intervallo di frequenza di riferimento 50 Hz 2600 Hz
Intervallo di tensione di riferimento 2V 115V
Impedenza di ingresso di riferimento 4,4 kΩ 129,2 kΩ
Gamma di tensione del segnale 2V 90V
Impedenza di ingresso del segnale 4,4 kΩ 102,2 kΩ
Sfasamento segnale/riferimento -70° +70°
Livello logico di ingresso Logica “1” ≥3,3V “0” logico ≤0,8V
ingresso 0 0,8 V
ingresso 0 0,8 V
ingresso 0 0,8 V
Livello logico di uscita Logica “1” ≥3,3V “0” logico ≤0,8V
Uscita codice angolo digitale Logica “1” ≥3,3V “0” logico ≤0,8V
Conversione dell'uscita del segnale di occupato (CB). 200 ns 600 ns
Rilevamento guasti Uscita bit Lo “0” logico indica un errore
Capacità di carico 3TTL
Velocità di tracciamento 2,5 giri/sec
Costante di accelerazione 12500
Tempo di assestamento 850 ms
Uscita tensione di velocità angolare (Vel). -10V +10V
Attuale Vsu003d+15V 10 mA
Vsu003d-15V 15 mA
VLu003d+5V 20 mA
5. Risposta al gradino
Quando si verifica un passaggio nel segnale di ingresso o l'accensione iniziale, la risposta verrà inibita a causa della limitazione della velocità di tracciamento massima. Il processo di oscillazione dell'angolo digitale di uscita è mostrato in Fig. 2:
Fig.2 Curva di risposta al gradino
6. Principio di funzionamento (Fig. 3)
Il segnale di ingresso di synchro (o resolver) viene convertito nel segnale ortogonale attraverso l'isolamento differenziale interno:
Vsinu003dKE0sin(ωt+α) sinθ (peccato)
Vcosu003dKE0sin(ωt+α) cosθ (cos)
Dove, θ è l'angolo di ingresso analogico.
Questi due segnali e l'angolo digitale φ del contatore interno reversibile vengono moltiplicati nel moltiplicatore delle funzioni seno e coseno e vengono trattati in errore:
KE0sin(ωt+α) (sinθ cosφ -cosθ sinφ)即KE0sin(ωt+α) sin(θ-φ)
Questo segnale viene inviato all'oscillatore controllato in tensione dopo l'amplificazione, la discriminazione di fase, la filtrazione di integrazione. Se θ-φ≠0, l'oscillatore controllato in tensione emetterà impulsi e il contatore reversibile li conta fino a θ-φu003d0 entro la precisione del convertitore. In questo processo, il convertitore tiene costantemente traccia del cambiamento dell'angolo di input.
Modalità di lettura:
Sono disponibili due metodi per il trasferimento dei dati:
(1) modalità
Dopo 640 ns di livello logico basso, i dati di output sono validi e il convertitore effettua il trasferimento dei dati tramite e . Dopo il rilascio di Inhibit, il sistema genererà automaticamente un impulso con la sua ampiezza uguale a quella di Occupato per l'aggiornamento dei dati.
(2) Modalità busto:
Sul fronte di salita dell'impulso Occupato, il contatore reversibile a tre stati conta; in corrispondenza del fronte discendente di Busy pulse genera internamente un impulso latch di ampiezza uguale a quella di Busy pulse per l'aggiornamento dei dati del latch a tre stati, la sequenza temporale di trasferimento dei dati è mostrata in Fig. 4, in altre parole , dopo 600 ns di logica occupata bassa, il trasferimento stabile dei dati è valido. In modalità di lettura asincrona, l'uscita Busy è un treno di impulsi di livello CMOS, le larghezze del suo livello alto e basso dipendono dalla frequenza operativa e dalla velocità di rotazione del dispositivo selezionato.
Fig. 3 Schema a blocchi del principio di funzionamento
Fig.4 Sequenza temporale del trasferimento dei dati
7. Curva MTBF (Fig. 5)
Fig. 5 Curva della temperatura MTBF 8. Designazione del perno (Fig. 6, Tabella 3)
Fig. 6 Perni (vista dal basso)
(Nota: secondo GJB/Z299B-98, buone condizioni del terreno previste)
Tabella 3 Designazione dei pin
Spillo Simbolo Significato Spillo Simbolo Significato
1 S1 Ingresso resolver S1 (o ingresso sincronizzato S1) 25 Abilita il controllo di cifre a 8 bit basse
2 S2 Ingresso resolver S2 (o ingresso sincronizzato S2) 26 Abilita il controllo di cifre a 8 bit alte
3 S3 Ingresso resolver S3 (o ingresso sincronizzato S3) 27 RIPCLK Uscita segnale a bit zero
4 S4 Ingresso resolver S4 (lasciare scollegato) 28 VL +5V di potenza
5~18 D1~D14 Uscita digitale 1 (MSB)-14 29 GND Terra
19 RH Ciao Ingresso del segnale di riferimento di fascia alta 30 NC Vacante
20 RLo Ingresso segnale di riferimento di fascia bassa 31 -Vs -15V di alimentazione
21 D15 Uscita digitale 15 32 -15V +15V di alimentazione
22 D16 Uscita digitale 16 (LSB) 33 Ingresso segnale statico
23 Vel Uscita segnale tensione di velocità angolare 34 Uscita bit di rilevamento guasti
24 GB Uscita segnale di occupato 36-36 NC Vacante
Note: D1~D16 Estremità di uscita del codice angolare digitale del sistema binario parallelo
S1, S2, S3, S4 Ingresso segnale del resolver (o synchro)
RH Ciao Ingresso del segnale di riferimento di fascia alta
RLo Ingresso segnale di riferimento di fascia bassa
Ingresso del segnale abilitato alla cifra a 8 bit inferiore, questo pin è il pin di ingresso logico del controllo del gating dei dati, la sua funzione è quella di eseguire il controllo a tre stati esternamente sui dati di uscita a 8 bit inferiori del convertitore. Il livello basso è valido, i dati di uscita a 8 bit bassi del convertitore occupano il bus dati. Quando è ad alto livello, il pin di uscita dati a 8 bit basso del convertitore appare in stato di alta impedenza, il dispositivo non occupa il bus. Il tempo di ritardo di abilitazione e rilascio è di 600 ns (max).
ingresso del segnale abilitato con cifre a 8 bit elevate, questo pin è il pin di ingresso logico del controllo del gating dei dati, la sua funzione è di eseguire il controllo a tre stati esternamente sui dati di uscita a 8 bit più alti del convertitore. Il livello basso è valido, i dati di uscita a 8 bit alti del convertitore occupano il bus dati. Quando è ad alto livello, il pin di uscita dati a 8 bit alto del convertitore appare in stato di alta impedenza, il dispositivo non occupa il bus. Il tempo di ritardo di abilitazione e rilascio è di 600 ns (max).
ingresso del segnale statico, questo pin è il pin di ingresso della logica di controllo del blocco dei dati, la sua funzione è quella di eseguire il controllo di selezione del blocco o bypass dei dati di uscita del convertitore. A livello alto, i dati di uscita del convertitore vengono emessi direttamente senza latch; a livello basso, i dati di uscita del convertitore vengono bloccati, i dati non vengono aggiornati, ma il loop interno non viene interrotto e il tracciamento funziona tutto il tempo, è stato collegato internamente con una resistenza di pull-up. Dopo 600 ns (max) di ritardo del fronte discendente del segnale statico, i dati diventano stabili (se il dispositivo occupa il bus dati, ovvero quando emette i dati dipende dallo stato di e ).
Uscita segnale CB “Occupato”, questo segnale indica se l'uscita in codice binario del convertitore è valida o meno. Dopo che la variazione dell'ingresso angolare raggiunge 0,33 minuti angolari, l'estremità CB emette un impulso positivo con una larghezza di 400 ns (tipico), quando CB è a livello alto, significa che il convertitore è in fase di conversione, in questo momento i dati di uscita non sono validi ; dopo che il fronte di discesa del segnale CB ritarda per 600 ns (max.), i dati diventano stabili, in questo momento i dati aggiornati in uscita sono validi.
uscita del bit di rilevamento guasti, il livello alto indica il normale funzionamento del convertitore, nel caso in cui il cavo del segnale sia rotto o il convertitore non riesca a tracciare normalmente, questo bit cambia in livello basso da livello alto.
RIPCLK: Uscita segnale zero R.C: quando i dati di uscita aumentano da tutto “1” a tutto “0”, o i dati di uscita decrescono da tutto “0” a tutto “1”, l'uscita è impulso positivo, l'ampiezza dell'impulso è 200μs .
VL, VS, VS Fine alimentazione in entrata
GND Estremità di ingresso del filo di terra
Suggerimenti:
① La tensione del pin non deve superare il 20% del valore nominale.
② La tensione di alimentazione non deve superare l'intervallo specificato.
③ Non collegare il riferimento RHi e RLo ad altri pin.
④ Per l'alimentazione collegata ai pin +VS e -VS, la sua tensione deve essere ±15V e non deve essere collegata in modo inverso. L'alimentatore della logica digitale VL è collegato a +5V. Tra l'alimentazione e la terra, collegare in parallelo un condensatore ceramico da 0,1 µF e un condensatore elettrolitico da 6,8 µF.
⑤ I segnali di riferimento sono collegati a RHi e RLo. Nel caso di sincro, i segnali sono collegati a S1, S2 e S3 secondo le seguenti convenzioni:
sin(ωt+α) sinθ
sin(ωt+α) sin(θ+120o)
sin(ωt+α) sin(θ+240o)
⑥ Nel caso di resolver, i segnali sono collegati a S1, S2, S3 e S4 secondo le seguenti convenzioni:
sin(ωt+α) sinθ
sin(ωt+α) cosθ
I pin di CB, , e devono essere tutti collegati come descritto per il trasferimento dei dati di cui sopra.
9. Tabella dei valori di peso (Tabella 4)
Tabella 4 Tabella dei valori di peso
Po Angolo/bit Minuto/bit angolare Po Angolo Minuto/bit angolare Po Angolo Minuto/bit angolare
1(MSB) 180.0000 10800 7 2.8125 168.75 13 0,0439 2.64
2 90.0000 5400 8 1.4063 84.38 14 0,0220 1.32
3 45.0000 2700 9 0,7031 42.19 15 0,0110 0,66
4 22.5000 1350 10 0,3516 21.09 16(LSB) 0,0055 0,33
5 11.2500 675 11 0,1758 10.55
6 5.6250 387.5 12 0,0879 5.27
10. Schema di collegamento per applicazione tipica (Fig. 7) 11. Specifiche della confezione (unità: mm) (Fig. 8, Tabella 5)
Fig. 7 Schema di collegamento per applicazione tipica
Fig. 8 Vista esterna e dimensioni dell'imballo
Tabella 5 Materiali del caso
Modello di custodia Intestazione Placcatura dell'intestazione Coperchio Placcatura di copertura Materiale dei perni Placcatura a perno Stile di tenuta Osservazioni
UP4820-36A 4J42 Rivestimento Ni 4J42 Rivestimento chimico Ni 4J42 Rivestimento Au Imballaggio abbinato Base più tre perle di vetro massiccio
12. Tasto di numerazione dei pezzi (Fig. 9)
Fig. 9 Legenda per la numerazione dei pezzi
Nota: quando la tensione del segnale di cui sopra e la tensione di riferimento (Z) non sono standard, devono essere fornite come segue:
(es. tensione di riferimento 5V e tensione di segnale 3V sono espressi come 5/3)
Precauzioni per l'uso
Fornire correttamente l'alimentazione, durante l'accensione, collegare accuratamente i poli positivo e negativo dell'alimentazione per evitare il burnout.
Durante l'assemblaggio, la parte inferiore del prodotto deve aderire strettamente alla scheda del circuito in modo da evitare danni ai pin e, se necessario, deve essere aggiunta una disposizione antiurto.
Non piegare i piedini per evitare che l'isolatore si rompa, che influiscono sulle proprietà di tenuta.
Quando l'utente effettua un ordine per il prodotto, gli indici dettagliati delle prestazioni elettriche devono fare riferimento allo standard aziendale pertinente.
Sincro/Resolver al convertitore digitale
(serie MSDC/MRDC37)
1. Caratteristiche (vedi Fig. 1 per la vista esterna e Tabella 1 per i modelli)
Alta precisione
Piccolo volume
Alta velocità di tracciamento
Tracciamento ininterrotto durante il trasferimento dei dati
Uscita latch a tre stati
Basso consumo energetico
Dimensioni: 50,8 × 50,8 × 10 mm2
Peso: 48 g
Fig.1 Vista esterna della serie MSDC/MDRC37 2. Ambito di applicazione
Servomeccanismo; monitoraggio dell'antenna; sistema di navigazione; controllo dell'artiglieria; controllo industriale; sistema robotico; sistema di controllo radar.
3. Schema
Le serie MSDC/MRDC37 sono convertitori digitali a 16 bit in synchro/resolver. Il segnale di ingresso è suddiviso in resolver a quattro fili e segnale di eccitazione o sincro a tre fili e segnale di eccitazione. Il segnale di uscita è un codice binario naturale parallelo bufferizzato tramite latch a tre stati e compatibile con il livello TTL.
Il prodotto applica un servocircuito di secondo ordine con volume ridotto e peso leggero e l'utente può utilizzarlo in modo molto conveniente controllando i pin del segnale.
4. Performance tecnica (Tabella 1, Tabella 2)
Tabella 1 Condizioni nominali e condizioni operative consigliate
Massimo valore di valutazione assoluto Tensione di alimentazione +VS: 12,5 ~ 17,5 V
Tensione di alimentazione Vs: 17,25 ~ 12,5 V
Tensione di alimentazione logica VL: 7V
Intervallo di temperatura di conservazione: -40 ~ + 100 ℃
Condizioni Operative Raccomandate Tensione di alimentazione +VS: 15V±5%
Tensione di alimentazione Vs: 15V±5%
Tensione logica VL: 5V±5%
Tensione di riferimento (valore efficace) VRef: valore nominale ±10%
Tensione del segnale (valore effettivo) Vi: ±10% del valore nominale
Frequenza di riferimento f*: valore nominale ±10%
Intervallo di temperatura di esercizio TA: 40℃~85℃
Nota: * indica che può essere personalizzato secondo le esigenze dell'utente.
Tabella 2 Caratteristiche elettriche
Caratteristiche Condizione
(40~+85℃)
(Se non diversamente specificato) (serie MSDC/MDRC37)
Unità
min. Massimo
Risoluzione/RES 0~360º 12 16 po
Velocità di tracciamento/St① 3 36 giri/sec
Alto livello di uscita/VOH ATu003d25℃ 2.4 V
Livello di uscita basso/VOL ATu003d25℃ 0.8 V
Consumo di energia/PD ATu003d25℃ 1.3 W
Vel linearità/ERI ATu003d25℃ 1.0 %
Intervallo di tensione di riferimento 2 115 V
Gamma di tensione del segnale 2 90 V
Intervallo di frequenze 30 2600 Hz
Precisione ±3 ±8,5 Minuto angolare
Nota: ① la velocità di tracciamento è 3 rps per una risoluzione a 16 bit e 36 rps per una risoluzione a 12 bit; St può essere progettato in base alle esigenze dell'utente.
5. Principio di funzionamento (Fig. 2)
Il segnale di ingresso sincronizzato (o segnale di ingresso del resolver) viene convertito nel segnale ortogonale attraverso l'isolamento differenziale interno:
V1u003dKE0sinθ sinωt,V2u003dKE0cosθ sinωt
Fig.2 Schema a blocchi per principio di funzionamento
Dove, θ è l'angolo di ingresso analogico.
Questi due segnali e l'angolo digitale φ del contatore interno reversibile vengono moltiplicati nel moltiplicatore delle funzioni seno e coseno e vengono trattati in errore:
K·E0sinθ cosφ sinωt-KE0cosθ sinφ sinωtu003dKE0sin(θ-φ) sinωt
I segnali vengono inviati all'oscillatore controllato in tensione dopo l'amplificazione, la discriminazione di fase, l'integrazione e la filtrazione, se θ-φ≠0, l'oscillatore controllato in tensione modifica i dati nel contatore reversibile con gli impulsi di uscita fino a quando θ-φ diventa zero entro la precisione di il convertitore, durante questo processo, il convertitore tiene costantemente traccia del cambiamento dell'angolo di ingresso θ.
La funzione di trasferimento del convertitore è mostrata in Fig. 3.
Fig. 3 Trasferimento di funzione del convertitore
闭环函数
Metodo di trasferimento dei dati e sequenza temporale
Esistono due metodi per leggere i dati effettivi nel convertitore: lettura sincrona e lettura asincrona.
(1) Modalità inibizione (lettura sincrona):
R: il convertitore è collegato con bus a 16 bit. B


 X
X




















 Gold Supplier
Gold Supplier