| Risoluzione a 14 bit e 16 bit |  |
| Precisione 4′ e 2′ | |
| Capacità dell'unità di uscita 2VA | |
| Errore vettore a basso raggio (0,03%) | |
| Dotato di protezione da sovratensione e protezione da cortocircuito | |
| Dotato di pin di uscita telemetrica | |
| Senza bisogno di aggiustamenti esterni | |
| Compatibilità pin-to-pin con il prodotto DRC1745/1746 dell'azienda AD |
Drive synchro/resolver; sistema di antenne; servosistema; integrato
simulatore.
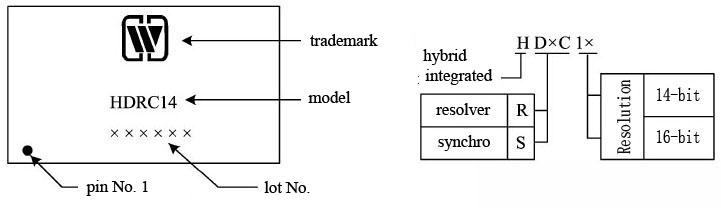
3. Descrizione dei convertitori da digitale a sincronizzato serie HDRC14-16 o convertitori da digitale a resolver
I prodotti della serie HDRC14/HDRC16 sono convertitori da digitale a resolver o
convertitori da digitale a sincronizzato della struttura del circuito integrato ibrido
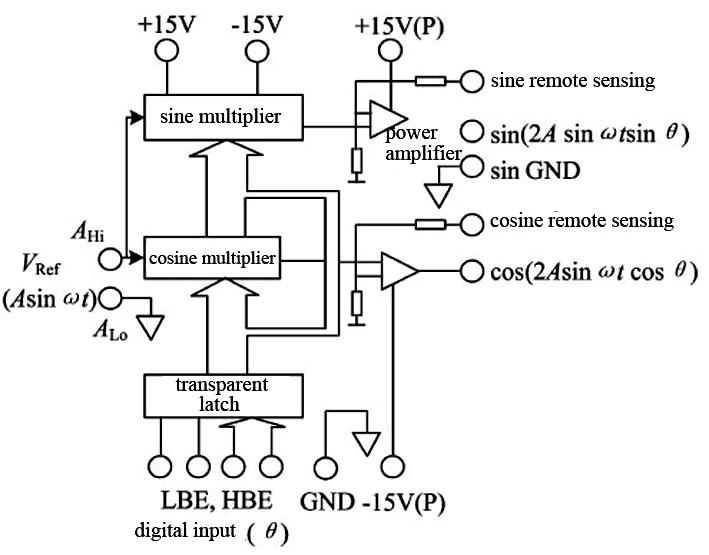
il carico può essere induttivo, capacitivo o resistivo, e lo è | |
dotato di protezione da sovracorrente e sovratensione. L'uscita di | il convertitore può pilotare direttamente il resolver e può anche pilotare il trasformatore di controllo di synchro collegando un trasformatore esterno. Le prestazioni uniche del prodotto della serie HDRC14/HDRC16 sono sinusoidali e |
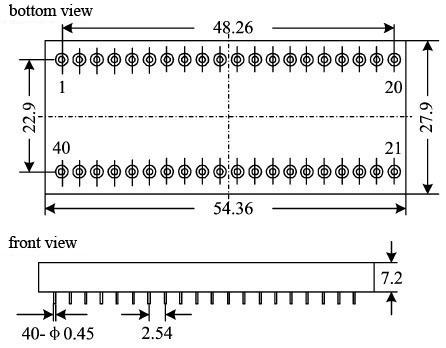
uscita telemetrica coseno. Pertanto, quando si esegue un'unità a linea lunga, puògarantire la precisione del segnale di uscita convertito. | I prodotti della serie HDRC14/HDRC16 sono dotati di fermo interno, che è controllato tramite l'estremità di abilitazione bit alto HBE e l'estremità di abilitazione bit basso LBE e può essere collegato comodamente con il bus dati. I prodotti della serie HDRC14/HDRC16 sono un doppio contenitore metallico in linea a 40 pin. |
4. Prestazioni elettriche (Tabella 1, Tabella 2) dei convertitori da digitale a sincronizzato serie HDRC14-16 o da digitale a resolver | ||||||
Tabella 1 Condizioni nominali e condizioni operative consigliate | Massimo assoluto valore nominale | Tensione di alimentazione Vs: ± 7,25V | Tensione logica VL: +5,5V | Intervallo di temperatura di conservazione: -65 ℃ ~ + 150 ℃ | ||
Operazione consigliata | condizioni | Tensione di alimentazione Vs: ± 5V | Tensione logica VL: +5V | |||
Frequenza di riferimento f: 400Hz~2000Hz | - | 14 | - | 16 | Intervallo di temperatura di esercizio TA: -55℃~125℃ | |
Tabella 2 Caratteristiche elettriche | - | Caratteristica | - | ±2 | HDRC14 | |
HDRC16 | Unità | Osservazioni | min. | Massimo | V | |
min. | Massimo | Risoluzione | po | Errore angolare | V | |
±5.3 Minuto angolare | Ingresso di riferimento analogico | 3.23 | 3.57 | 3.23 | V | |
3.57 | - | 25 | - | 25 | Uscita del segnale del resolver | |
6.46 | 0 | 7.14 | 0 | 6.46 | 7.14 | |
Guadagno | (VRef-Vo) | - | 1.999 | - | kΩ | |
2.001 | - | 1.999 | - | 2.001 | Ω | |
Coefficiente di temperatura del guadagno di uscita | - | 2 | - | 2 | VA | |
PPM/℃ | - | Gamma di frequenza di ingresso analogico | - | 2.6 | - | |
2.6 | kHz | Impedenza di ingresso analogico | - | |||









 (2) Alimentazione pulsante
(2) Alimentazione pulsante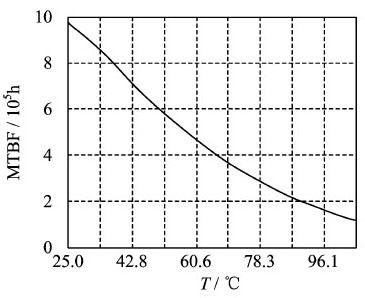

Zu003dcarico in uscita | (3) Esempio di consumo energetico | Ci sono molti fattori che influenzano il consumo di energia, il | seguenti quattro esempi utilizzano carichi tipici e il peggior angolo digitale | stato (45º). Questi esempi possono illustrarlo utilizzando la potenza pulsante | può ridurre il consumo di energia. | Qui le condizioni operative sono: | VCCu003d±15V; Vpu003d3V; Voutu003d9,6 V (il valore efficace è 6,8 V); VACu003d9,6 V (circa | uguale a Vout); I1u003d292mA (equivalente a un carico che richiede 1,4VA). |
1 | ① Alimentazione DC, θu003d45º, carico resistivo | ② Come nell'esempio 1, l'alimentazione è a 3 V pulsante. | 13 | Quando si utilizza la potenza pulsante, il consumo energetico interno si riduce di 1,75 W, il loro rapporto è 3,2:1. | ③ Alimentazione DC, θu003d45º, carico induttivo puro | 28 | ④ Come nell'esempio 3, l'alimentazione è a 3V pulsante. | (4)Carico |
2 | D2 | Successivamente, illustreremo come calcolare il carico. Per il controllo | 14 | trasformatore di sincro, prima occorre ottenere il valore di Zso, | che è generalmente fornito dal produttore sincronizzato. Il controllo | 29 | V- | il carico è: |
3 | D3 | Dove, V2 è il valore efficace della tensione del segnale. | 15 | Se viene aggiunto un trasformatore di uscita sul pin di uscita, alla potenza calcolata verranno aggiunti 0,25 VA. | Ad esempio, supponiamo che il valore efficace del segnale sia 90 V, 400 Hz, utilizzare | 30 | V+ | Trasformatore di uscita esterno HRDC14 per pilotare il trasformatore di controllo di |
4 | D4 | sincronizzato. L'uso di un trasformatore esterno serve ad aumentare il valore RMS di | 16 | uscita in tensione di HRDC14 da 6,8 V a 90 V richiesta dal controllo | trasformatore. | 31 | Per il trasformatore di controllo di synchro, Zso è 700+j4900. | Pertanto, il carico quando si utilizza il trasformatore di controllo è: |
5 | D5 | ; quindi più il consumo di energia aggiuntivo del trasformatore, il consumo di energia totale è di 1,48 VA. | Questo metodo può essere utilizzato anche per l'applicazione che utilizza la rotazione | NC | trasformatore di controllo, ma non è necessario moltiplicarlo per 3/4. | 32 | LE | 6. Curva MTBF (Fig. 3) dei convertitori da digitale a sincronizzatore della serie HDRC14-16 o da digitale a resolver |
6 | D6 | Fig. 3 Curva della temperatura MTBF | 21 | (Nota: secondo GJB/Z299B-98, buone condizioni del terreno previste) | 7. Designazione dei pin (fig.4, Tabella 3) dei convertitori da digitale a synchro o da digitale a resolver serie HDRC14-16 | 33 | HE | Fig.4 Diagramma schematico del pin (vista dal basso) |
7 | D7 | Tabella 3 Descrizione funzionale dei pin | 22 | Spillo | Simbolo | 34 | Funzione | Spillo |
8 | D8 | Simbolo | 23 | Funzione | Spillo | 35 | Simbolo | Funzione |
9 | D9 | D1(MSB) | 24 | Ingresso digitale a 1 bit | D13 | 36 | Ingresso digitale a 13 bit | GND |
10 | Terra analogica | Ingresso digitale a 2 bit | 25 | D14(LSB) | Ingresso digitale a 14 bit | -Alimentazione 15V | NC | Ingresso digitale a 3 bit |
11 | D15 | Ingresso digitale a 15 bit | 26 | Alimentazione +15V | Ingresso digitale a 4 bit | |||
12 | D16(LSB) | Ingresso digitale a 16 bit | 27 | V1+ | Alimentazione +5V |
Fine uscita coseno | Selezione alta a 8 bit abilitata | Ingresso digitale a 7 bit | Vsin | Uscita sinusoidale | RLo | |
1 | Ingresso di riferimento di fascia bassa | 7 | Ingresso digitale a 8 bit | 13 | V+P | |
2 | Potenza pulsante +15V | 8 | RH Ciao | Ingresso di riferimento di fascia alta | Ingresso digitale a 9 bit | |
3 | V-P | 9 | -15V potenza pulsante | 15 | Caso | |
4 | Caso a terra | 10 | D10 | Ingresso digitale a 10 bit | cos telemetria | |
5 | Fine telemetrica del coseno | 11 | 37-40 | |||
6 | Nessuna connessione | 12 | D11 |
peccato telemetria | Fine telemetrica sinusoidale |
 | |
richiesto, quindi “HBE” e “LBE” possono essere a circuito aperto. | Tutti i pin di ingresso digitali hanno una resistenza di pull-up di 27kΩ all'interno | collegato con alimentazione 5V, quindi, se 50μA di corrente su qualsiasi ingresso latch | pin perde all'unità digitale esterna, può comunque garantire tutto l'input | i pin compatibili con il livello TTL sono stabili. | 8. Tabella dei valori di peso (Tabella 4) dei convertitori da digitale a sincronizzato serie HDRC14-16 o da digitale a resolver | Tabella 4 Tabella dei valori di peso | Bit/(MSB) | Angolo |
Bit/(MSB) | Angolo | Bit/(MSB) | Angolo | 180.000 0 | 2.812 5 | 0,043 9 | 90.000 0 |

Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier